视场角、分辨率和点频
1 概述
作为激光雷达扫描结果的直观呈现方式,点云(Point Cloud)由海量离散的三维空间坐标点构成,每个点包含位置(X,Y,Z)和反射强度等信息。视场角(FOV, Field of View)、分辨率(Resolution)和点频(Point Rate)是影响点云质量的核心参数,三者通过不同机制共同决定了点云的密度、覆盖范围和细节刻画能力等特征。
2 视场角(FOV)
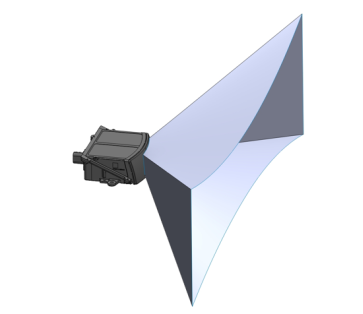
激光雷达的视场角(FOV,Field of View)定义为其点云两侧最边缘的有效点与测距中心连线在水平或垂直方向上形成的最大夹角,包括水平FOV(HFOV)和垂直FOV(VFOV),反映了点云的视野范围和空间覆盖能力。 激光雷达的FOV主要由其光学系统架构和扫描方式决定。以水平FOV为例,对于机械旋转式的激光雷达,由电机旋转控制水平方向上的扫描,能够覆盖完整一周的角度范围,因此其HFOV可以达到360°(例如Pandar128、QT128等),而对于使用转镜或振镜(MEMS)进行扫描的半固态激光雷达,其HFOV通常为120°(例如AT128,参见下方的FOV示意图)。
3 分辨率
激光雷达的点云分辨率通常指水平和垂直方向上的角度分辨率,定义为相邻探测点到测距中心之间连线所形成的夹角,或相邻扫描线之间的角度间隔。分辨率不仅可以体现点云对物体轮廓的还原能力,也决定了激光雷达能够有效捕捉到的物体细节特征,对于利用点云识别检测各类目标物有着直接的影响。 类似于FOV,机械雷达的分辨率也与其扫描方式有着直接关系:
- 机械旋转式和一维转镜扫描方式的激光雷达(例如QT128、AT128等),其垂直方向的分辨率(Vres)主要由FOV内激光器的数量与装调间隔决定(通常一个激光器对应一个发光通道);而水平方向的分辨率(Hres)则与激光雷达转速以及激光器发光时间间隔等因素相关(即某通道连续两次发光之间的角度差值),通常与转速成反比;
- MEMS或二维扫描方式的激光雷达(例如ETX),其分辨率通常取决于内部系统对于扫描的控制,可以是均匀的水平或垂直分辨率,也可以在某一区域密集扫描,形成一个分辨率加密的区域(即ROI)。
注:在实际激光雷达使用中可能还会涉及到测距分辨率的概念,也即距离测量的最小刻度或最小步长(LSB),反映了点云距离之间的最小间隔。禾赛激光雷达产品中该距离分辨率的常见值为4mm或5mm(取决于该产品的最远测距能力)。
3.1 FOV与分辨率对应用场景的影响
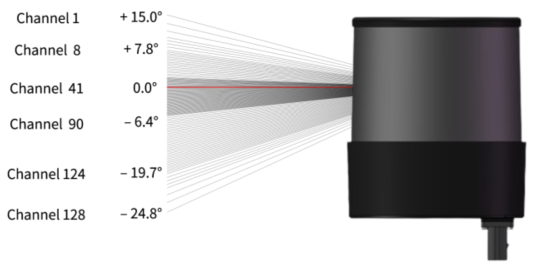
由于激光雷达系统架构特性的限制,FOV与分辨率这两个参数指标通常会形成相互制约的关系,即具备高垂直分辨率的激光雷达,其VFOV一般比较有限,例如OT128(如下图, 40°VFOV + 最高0.125°Vres);
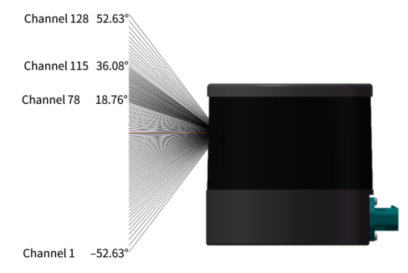
而VFOV较大的激光雷达,其垂直分辨率又相对较低,例如QT128(如下图, 105.2°VFOV + 最高0.4°Vres)。
因此在现实应用场景中,需要基于实际的感知需求选择FOV和分辨率指标合适的激光雷达。例如在自动驾驶应用中,可以通过使用长距激光雷达+短距激光雷达的组合,利用长距激光雷达分辨率高的特点对远处车辆和障碍物进行有效捕捉识别,而利用短距激光雷达大FOV的特点进行近处补盲探测,实现不同激光雷达产品之间的优势互补。
4 点频
激光雷达的点频又称为点云密度,通常指单位时间内能够输出的总有效点数。该参数直接影响了目标检测和识别的可靠性。 对于激光雷达每秒的点频,可采用以下公式进行计算:
其中,垂直方向点数由发光通道数量决定,水平方向点数为水平FOV与分辨率的比值,而帧率(Frame rate)又称为刷新率,即每秒输出帧数量,常见值有10Hz、20Hz等。
注意在以上定义中提到了帧的概念,对于采用重复扫描方式的禾赛激光雷达产品而言,一帧点云代表在标称视场角内单次完整扫描所形成的点云数据。不同扫描方式的激光雷达其帧的定义也有一定差异:
- 机械旋转式,水平FOV为360°,即旋转一圈为一帧;
- 半固态一维扫描式,以AT系列产品为例,其水平FOV通常为120°,则每完成120°FOV的点云扫描即为一帧;
- MEMS或二维扫描式,同时在水平和垂直方向上扫描完整FOV得到的点云才称之为一帧;
以AT128P为例,在10Hz帧率、单回波模式下,其每秒点频为:128 × (120/0.1) × 1 × 10 = 1,536,000 points/s
点频是一个激光雷达产品FOV、分辨率以及综合探测成像能力的最直接体现。高点频的激光雷达能够对目标物体扫描地更精细,有助于提高应用端感知算法的识别能力。根据点频计算公式可知,提高点频可以通过提高垂直方向通道或激光器数量数量、水平方向FOV和分辨率、帧率和回波数量等方式实现,然而点频的提高也同时对激光雷达的信号采样能力、数据传输带宽、整体功耗和可靠性等性能指标提出了更高的要求,意味着更高的成本要求,同时增加的点云数据量也对应用端系统的数据传输能力和点云处理算力提出了更高挑战,因此在现实应用中需要根据实际需求对激光雷达的点频指标进行综合评估。