Field of View, Resolution and Point Rate
1 Overview
As an intuitive representation of lidar scanning results, point clouds consist of a large number of discrete 3D spatial coordinate points, with each point containing information such as position (X, Y, Z) and reflection intensity. Field of View (FOV), Resolution, and Point Rate are the core parameters that affect the quality of point clouds. These three parameters collectively determine the density, coverage, and detail representation of point clouds through different mechanisms.
2 Field of View (FOV)
The Field of View (FOV) of a lidar is defined as the maximum angle formed between the lines connecting the farthest effective points on both sides of the point cloud to the ranging center, in either the horizontal or vertical direction. It includes Horizontal FOV (HFOV) and Vertical FOV (VFOV), reflecting the range of vision and spatial coverage of the point cloud.
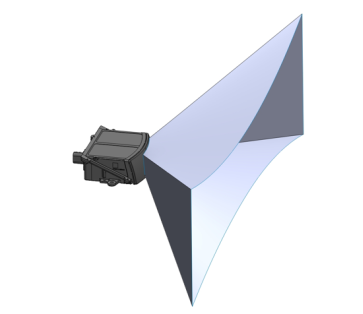
The FOV of a lidar is primarily determined by its optical system architecture and scanning method. For example, in mechanical rotating lidars, the motor controls the horizontal scanning, covering a full 360° angle range (e.g., Pandar128, QT128). In contrast, semi-solid-state lidars using rotating mirrors or MEMS mirrors for scanning typically have an HFOV of 120° (e.g., AT128, as shown in the FOV diagram below).
3 Resolution
The resolution of a lidar point cloud typically refers to the angular resolution in the horizontal and vertical directions, defined as the angle formed between the lines connecting adjacent detection points to the ranging center or the angular spacing between adjacent scan lines. Resolution reflects the ability of the point cloud to restore object contours and determines the level of detail the lidar can capture, directly impacting the recognition and detection of various targets using point clouds.
Similar to FOV, the resolution of mechanical lidars is directly related to their scanning method:
- For mechanical rotating and one-dimensional mirror scanning lidars (e.g., QT128, AT128), the vertical resolution (Vres) is mainly determined by the number of lasers within the FOV and their alignment spacing (typically one laser corresponds to one emission channel). The horizontal resolution (Hres) is related to the lidar's rotation speed and the laser emission time interval (i.e., the angular difference between two consecutive emissions of the same channel), which is usually inversely proportional to the rotation speed.
- For MEMS or two-dimensional scanning lidars (e.g., ETX), the resolution is typically determined by the internal system's control over scanning. It can be uniform horizontal or vertical resolution or concentrated scanning in a specific area to form a resolution-enhanced region (ROI).
Note: In practical lidar applications, the concept of ranging resolution may also be involved, referring to the smallest scale or step size (LSB) of distance measurement, reflecting the minimum spacing between point cloud distances. Common values for ranging resolution in Hesai lidar products are 4mm or 5mm (depending on the product's maximum ranging capability).
3.1 The Impact of FOV and Resolution on Application Scenarios
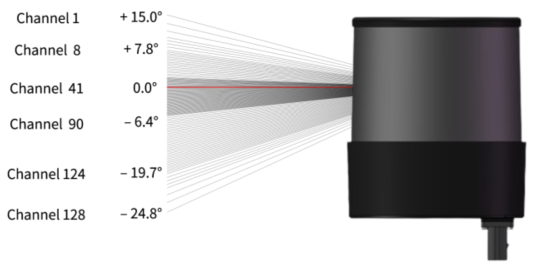
Due to the limitations of lidar system architecture, FOV and resolution often form a trade-off relationship. For example, lidars with high vertical resolution generally have limited VFOV, such as OT128 (40° VFOV + maximum 0.125° Vres, as shown below):
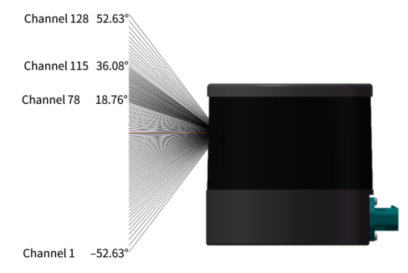
On the other hand, lidars with larger VFOV tend to have relatively lower vertical resolution, such as QT128 (105.2° VFOV + maximum 0.4° Vres, as shown below):
In real-world application scenarios, it is necessary to select lidars with appropriate FOV and resolution parameters based on actual perception needs. For example, in autonomous driving applications, a combination of long-range lidar + short-range lidar can be used. The high resolution of long-range lidar can effectively capture and identify distant vehicles and obstacles, while the large FOV of short-range lidar can be used for close-range blind spot detection, achieving complementary advantages between different lidar products.
4 Point Rate
The point rate of a lidar, also known as point cloud density, typically refers to the total number of effective points output per unit of time. This parameter directly affects the reliability of target detection and recognition.
The point rate per second for a lidar can be calculated using the following formula:
Here, the vertical points are determined by the number of laser channels, the horizontal points are the ratio of horizontal FOV to resolution, and the frame rate (also known as refresh rate) refers to the number of frames output per second, with common values being 10Hz, 20Hz, etc.
Note that the concept of a frame is mentioned in the above definition. For Hesai lidar products using repetitive scanning methods, a frame of point cloud represents the point cloud data formed by a single complete scan within the nominal FOV. The definition of a frame varies for different scanning methods:
- For mechanical rotating lidars, the horizontal FOV is 360°, meaning one rotation equals one frame.
- For semi-solid-state one-dimensional scanning lidars, such as the AT series, the horizontal FOV is typically 120°, meaning one frame is completed after scanning 120° FOV.
- For MEMS or two-dimensional scanning lidars, a frame refers to the point cloud obtained by scanning the complete FOV in both horizontal and vertical directions.
For example, for the AT128P, at a 10Hz frame rate and single-echo mode, the point rate per second is:
128 × (120/0.1) × 1 × 10 = 1,536,000 points/s
The point rate is the most direct reflection of a lidar product's FOV, resolution, and overall detection and imaging capabilities. High point rate lidars can scan target objects more finely, improving the recognition ability of perception algorithms on the application side. According to the point rate calculation formula, the point rate can be increased by increasing the number of vertical channels or lasers, horizontal FOV and resolution, frame rate, and the number of echoes. However, increasing the point rate also imposes higher requirements on the lidar's signal sampling capability, data transmission bandwidth, overall power consumption, and reliability, leading to higher costs. Additionally, the increased point cloud data volume poses greater challenges to the data transmission capability and point cloud processing power of the application-side system. Therefore, in real-world applications, the point rate parameters of lidars need to be comprehensively evaluated based on actual needs.