使用 PandarView
1 概述
PandarView2 是禾赛官方提供的可视化点云调试工具,可用于激光雷达点云实时播放、录制与回放、网络/串口连接验证等功能。
2 常用操作说明
2.1 下载与安装
最新版本的 PandarView2 软件和使用说明手册可通过禾赛官网进行下载。 对于电脑主机操作系统(Windows、Ubuntu)相关硬件和驱动配置的要求、适用激光雷�达型号以及安装注意事项等信息,详见 PandarView2 用户手册。
注:在 Ubuntu 操作系统中,PandarView2 的安装文件为.bin 文件格式,相应的安装方法为在此.bin 文件所在路径下运行以下命令:
sudo chmod +x PandarView_Release_Ubuntu_V2.1.7.bin #此处替换为实际使用版本的 PandarView2 安装文件
sudo ./PandarView_Release_Ubuntu_V2.1.7.bin
安装成功后,运行 PandarView2 软件时需要在对应的安装路径下运行以下命令:
sudo ./PandarView.sh
在使用 PandarView2 软件播放点云前,需要先确认:
- 激光雷达能正常工作;
- 电脑主机能正常接收点云 UDP 数据包(可通过 Wireshark 软件检查确认);
2.2 启动与连接
启动 PandarView2 后,点击工具栏左起第二个图标按键(如下图所示),进入数据连接设置:

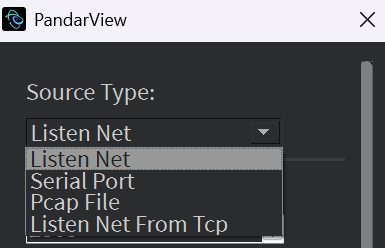
PandarView2 可支持以下四种方式获取点云数据用与播放:
- Listen Net:以太网口实时接收点云
- Serial Port:串口实时接收点云(如 JT16)
- Pcap File:读取保存的
.pcap文件进行离线回放 - Listen Net From TCP:通过 TCP 接口接收点云
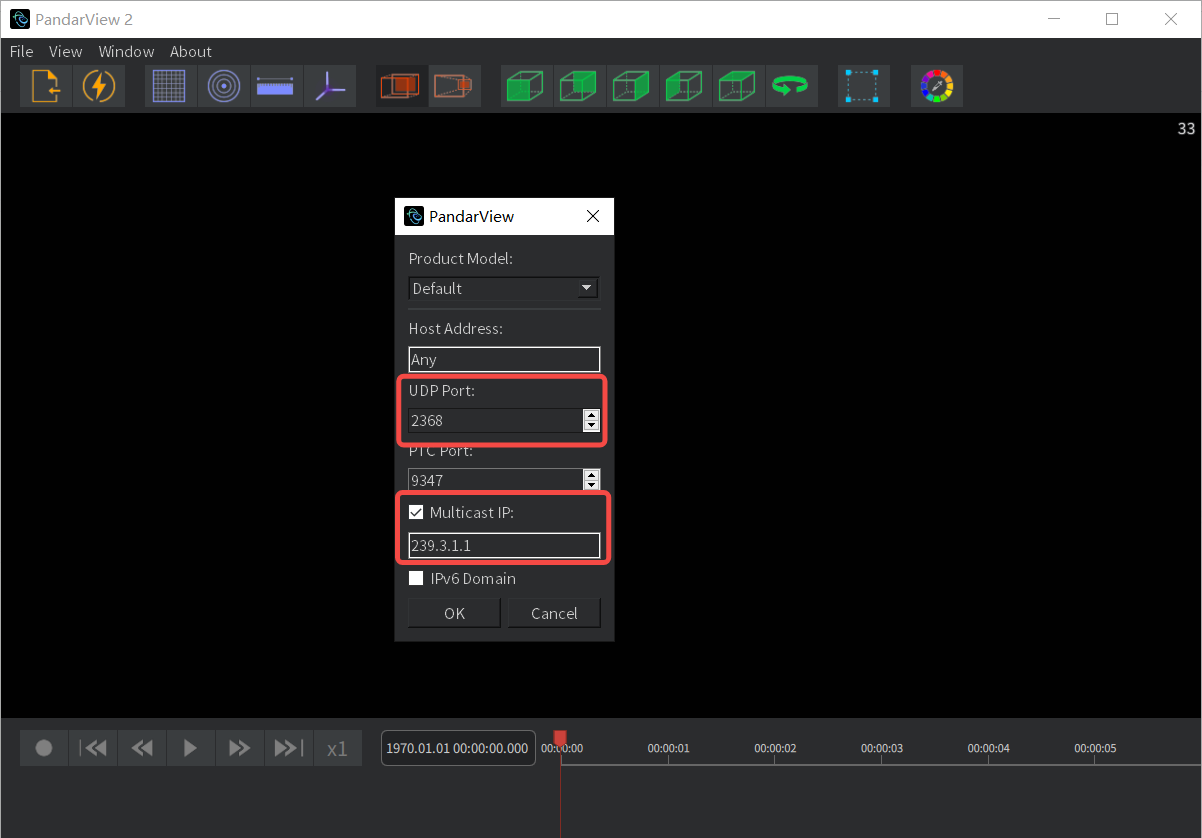
这里以“Listen Net”方式为例,当按照下图所示的配置完成后点击 OK,PandarView2 会自动尝试建立连接。
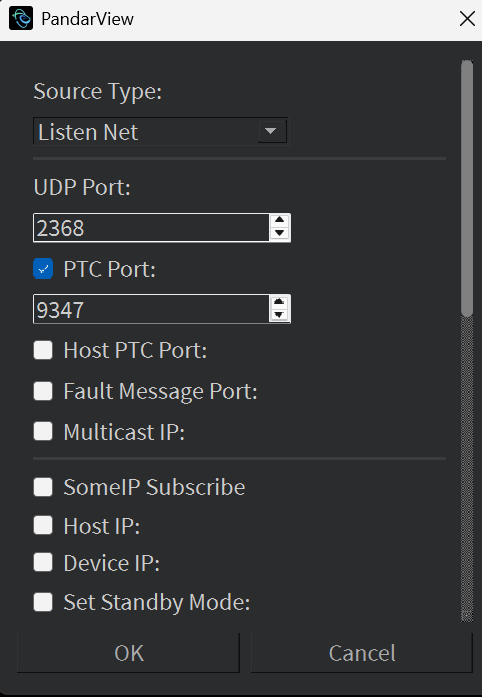
图中所示的配置参数含义说明如下:
| 参数名 | 含义 |
|---|---|
| UDP Port | 雷达点云数据包的 UDP 端口 |
| PTC Port | 控制通道端口,用于配置参数 |
| Host PTC Port | 本机监听的 TCP 控制端口 |
| Fault Message Port | 用于接收雷达故障码的 UDP 端口 |
| Multicast IP | 组播模式下工作时,需要填写组播地址 |
| SomeIP Subscribe | 是否启用 SomeIP 协议订阅(用于车载域控制器通信) |
| Host IP | 主机的 IP 地址 |
| Device IP | 雷达设备的固定 IP 地址 |
| Set Standby Mode | 进入雷达待机模式 |
2.3 点云修正
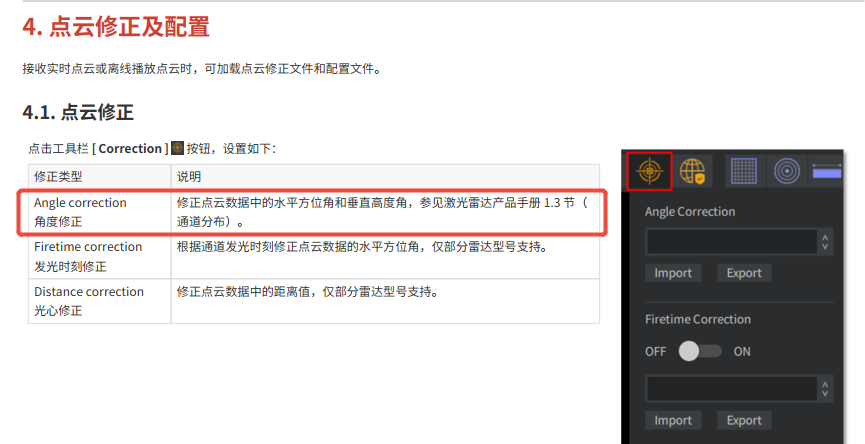
如下图所示,PandarView2 工具栏左起第三个图标按键即为点云修正选项(Correction),可支持在实时播放点云或离线回放 pcap 文件时导入相应的修正文件开启点云校正,或在实时播放点云时导出激光雷达自带的修正文件。
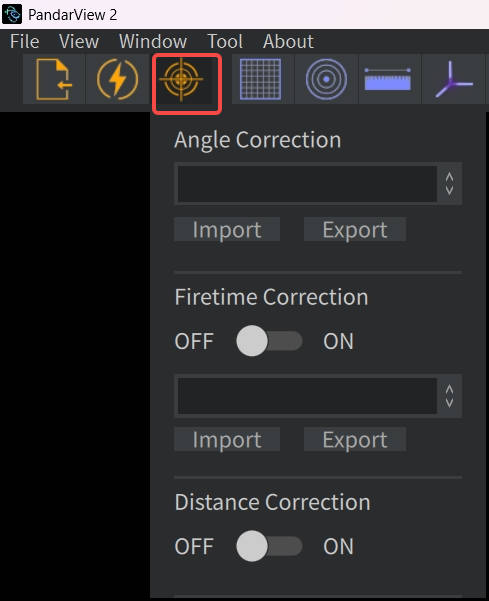
PandarView2 可支持以下三类不同的点云修正选项:
- 角度修正(Angle Correction):点击 Import,导入该激光雷达的角度修正文件,实现修正效果。
- 发光时刻修正(Firetime Correction):点击 Import,导入该激光雷达的发光时刻修正文件,实现修正效果。
- 距离修正(Distance Correction):开启该修正选项开关后,实现修正效果。(注:此选项用于修正因激光雷达发光中心与几何中心不重合引入的距离误差)
2.4 激光通道选择
如下图所示,在 PandarView2 工具栏中点击图中所框出的图标按键(Channels)后,可查看或更改当前显示点云的激光通道以及对应的角度参数。通过勾选或取消勾选该表最左侧的复选框,可控制显示或隐藏对应通道的点云。
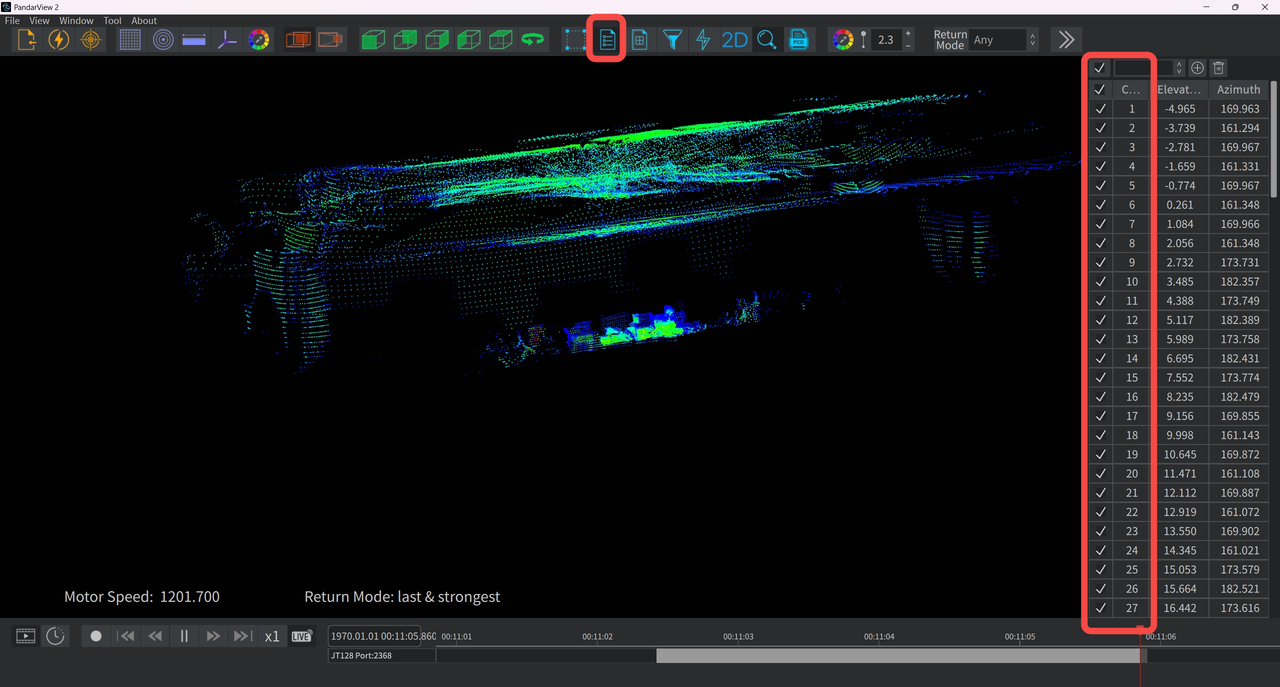
2.5 数据点选择及数据表
如下图所示,在 PandarView2 工具栏中点击图中所框出的左侧图标按键(Select)后,可在当前点云区域通过拖动鼠标,手动框选并高亮显示一组数据点;点击图中工具栏区域所框出的右侧图标按键(Spread Sheet)后,可查看所选数据点的所有详细数据。
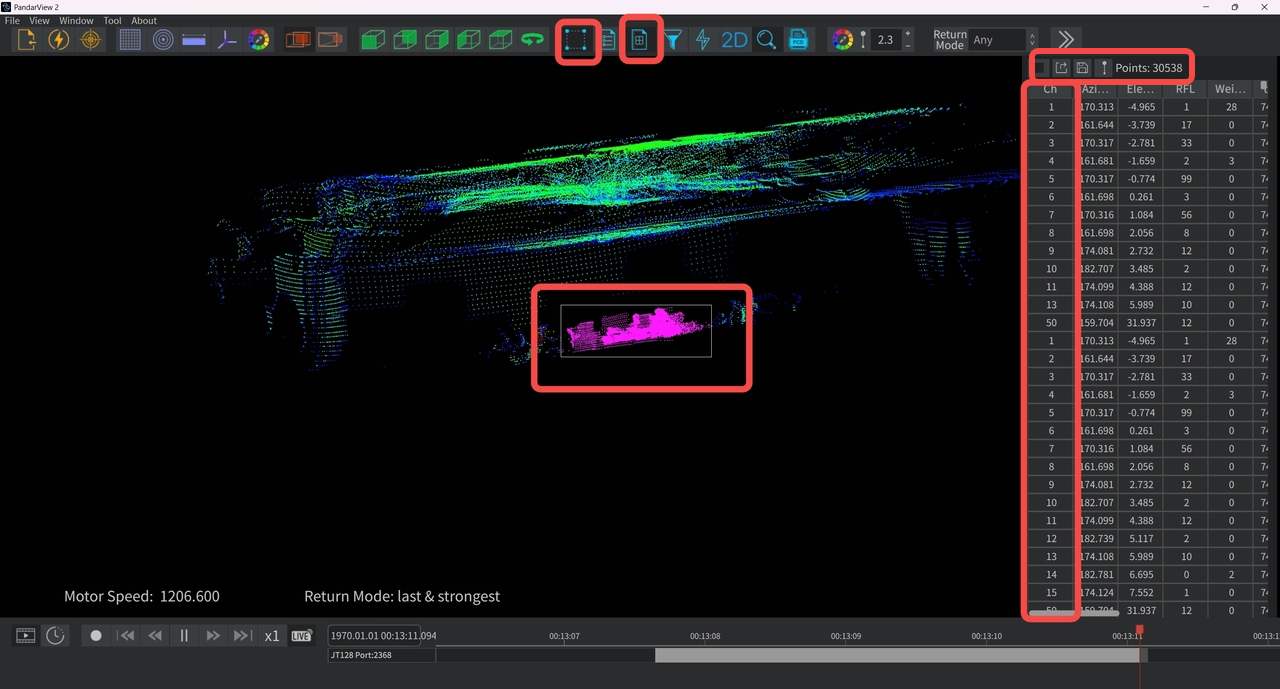
以下是数据表正上方框出的从左到右三个小按键的功能说明:
| 按键名称 | 功能说明 |
|---|---|
| Select All | 显示该帧点云全部数据点的详细��数据。 再次点击时,仅显示所选数据点的详细数据 |
| Export Points Info | 将当前数据表导出为 CSV 文件 Ubuntu 系统下命名文件时,需包含后缀(.csv) |
| Save Column Order | 保存当前的列顺序 |
数据表中各列的表头定义如下(注:不同产品型号在该界面上展示的具体参数可能有所差异):
| 表头名 | 含义 |
|---|---|
| Ch | 通道序号 |
| Ele | 垂直高度角 |
| AziCorr | 根据角度修正文件修正的水平方位角 |
| t | 点云时间戳 |
| Dist | 距离 |
| Field | 针对 AT 系列雷达,该测量数据对应镜面编号 |
| Rfl | 反射率 |
| AziState | 方位角标识,用于查表计算各通道的发光时刻偏移 |
| Azi | 未修正的水平方位角 |
| Weight Factor | 点云置信度 (雨雾噪点标记) |
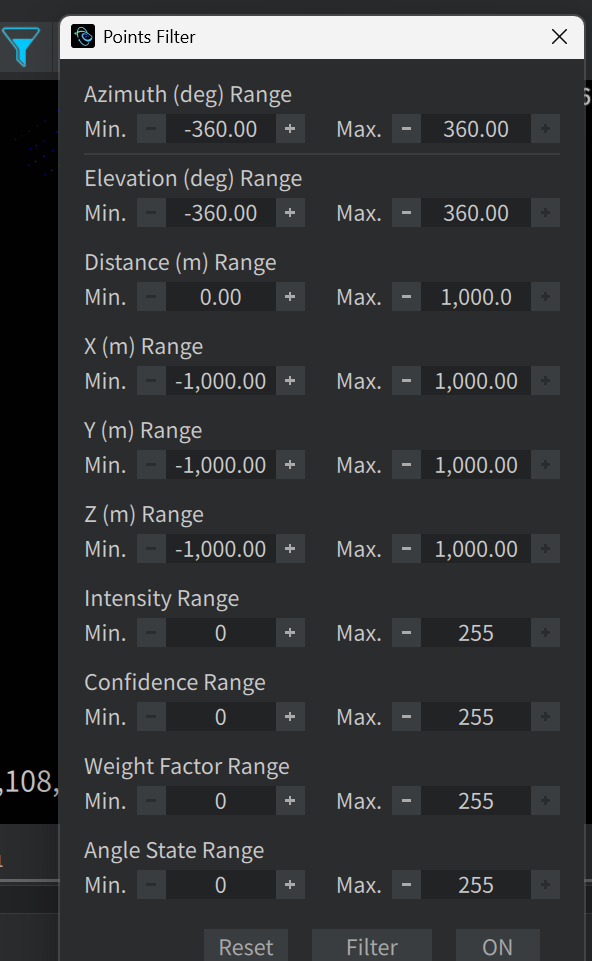
2.6 点云过滤
如下图所示,在 PandarView2 工具栏中点击图中所框出的图标按键(Points Filter)后,可通过设置各个参数的有效范围,显示仅符合相应范围的数据点。
例如设置 Weight Factor(权重因子)的范围,可以过滤已被标记的离散噪点(例如雨雾、扬尘或尾气)
注:点云过滤设置仅作用于当前 PandarView 界面上显示的点云,并不影响已录制和保存的 PCAP 文件。
2.7 点云轨道
如下图所示,右击 PandarView2 页面正下方的时间轨道轴,可显示以下选项:

| 选项 | 功能说明 |
|---|---|
| Cut by Time | 按时间戳截短点云,并保存为 PCAP 文件 |
| Cut by Frame | 按帧截短点云,并保存为 PCAP 文件 |
| Export Detail | 指定起止帧号,将相应的点云数据导出到 CSV 文件 |
| Delete Track | 删除点云轨道 |
| Cancel | 关闭菜单 |
2.8 其他点云显示控制
下图显示了 PandarView2 工具栏中其他常用功能按键,从左至右功能分别如下:

| 按键名称 | 功能说明 |
|---|---|
| Laser Tracing | 显示该台雷达的激光束 |
| State Info | 在点云显示区的左下角显示状态信息,例如电机转速(Motor Speed)、回波模式(Return Mode)和 PCAP 文件名 |
| Dump PCD | 将当前帧转储为.pcd(Point Cloud Data)格式文件,并指定文件位置 |
| Point Size | 设置数据点的显示大小 |
| Return Mode | 选择显示点云的回波 |
3 常见 PandarView 问题排查
3.1 点云数据实时播放
3.1.1 点云不显示
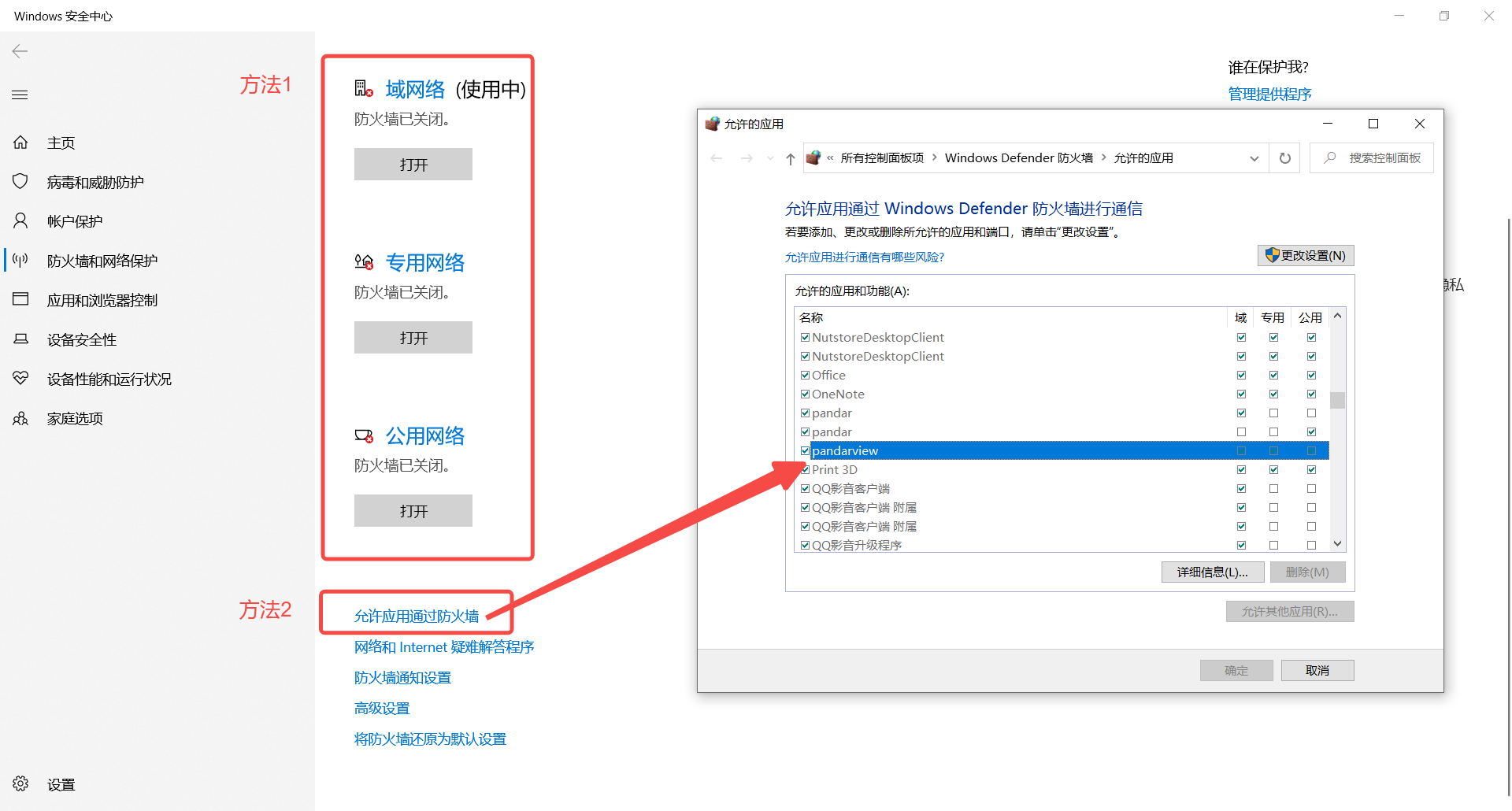
- 检查主机防火墙
在使用 PandarView2 软件播放实时点云过程中,需要保持电脑主机防火墙为关闭状态,或允许 PandarView2 程序通过防火墙(设置方法如下图所示):
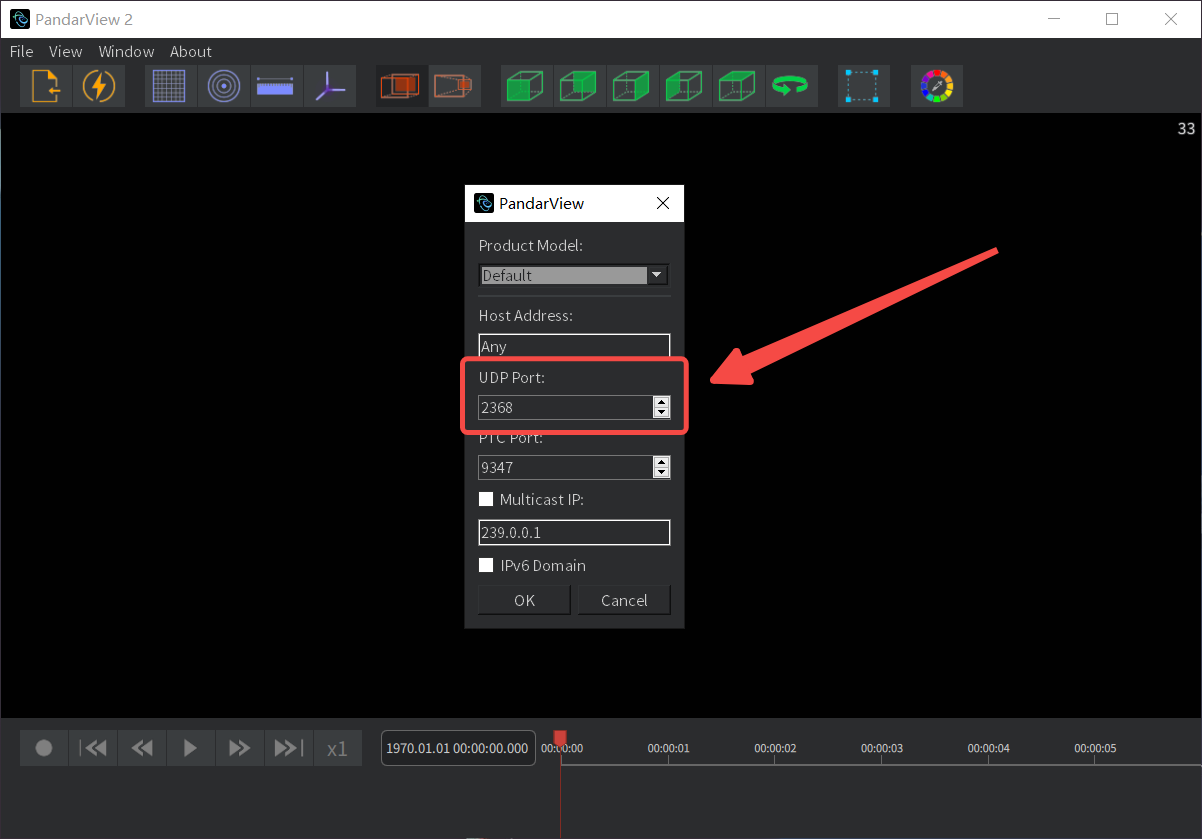
- 检查激光雷达网络参数设置
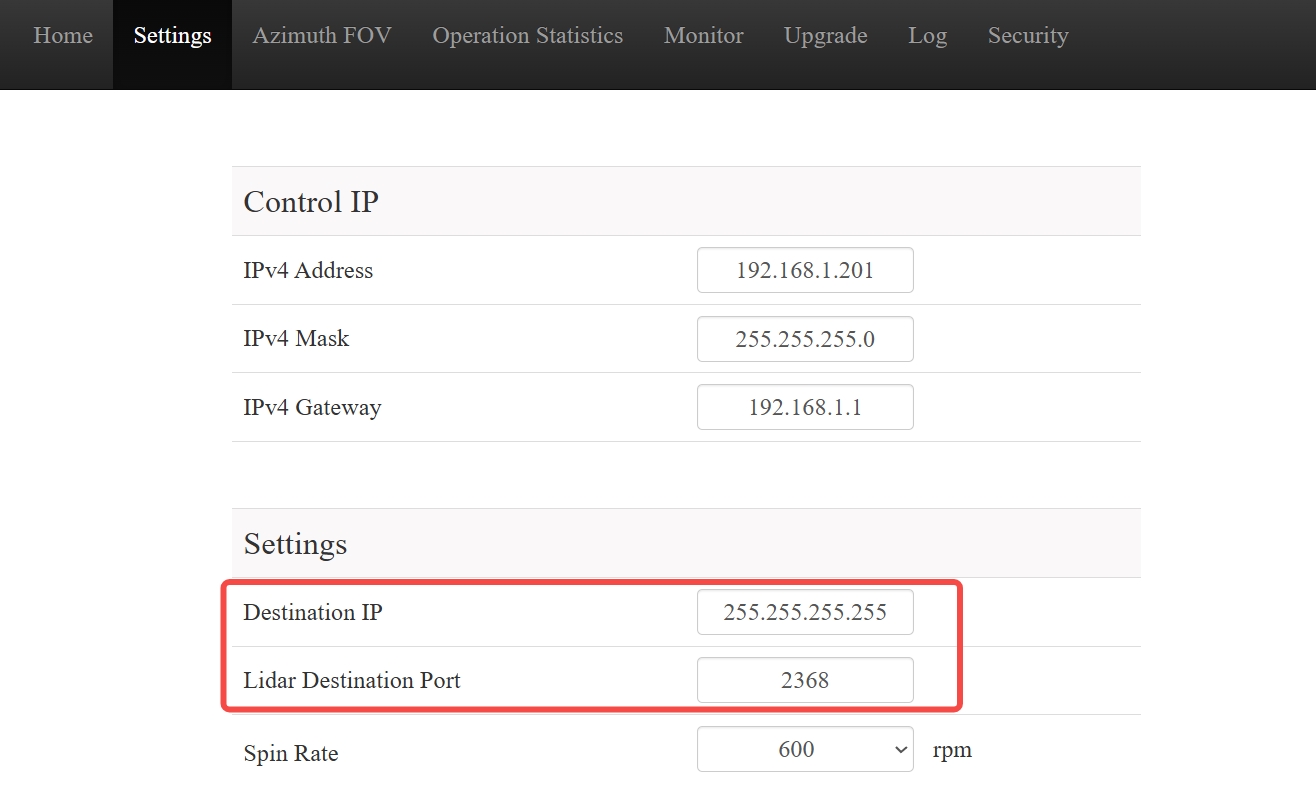
a. 激光雷达配置为广播模式: 需将 Pandarview2 - Listen for Data 弹窗中的UDP Port选项更改为实际设置的目的端口号(该参数的出厂默认值为2368,实际值可通过激光雷达控制页面获取,如下图所示)。
网页控制页面(Pandar 系列/QT 系列/XT 系列等型号)
LidarUtilities 界面(OT128/AT128P 等型号)
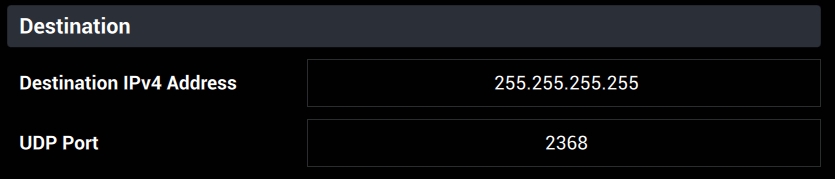
b. 激光雷达配置为单播模式: 需将电脑主机 IP 地址配置为激光雷达的Destination IP(该参数可通过激光雷达控制页面获取),并将 Pandarview2 - Listen for Data 弹窗中的UDP Port选项更改为实际设置的目的端口号(该参数的出厂默认值为2368,实际值可通过激光雷达控制页面获取)。
c. 激光雷达配置为组播模式: 需将 Pandarview2 - Listen for Data 弹窗中的UDP Port选项更改为实际设置的目的端口号(该参数的出厂默认值为2368,实际值可通过激光雷达控制页面获取),同时选中弹窗里的Multicast IP选项并配置为激光雷达的Destination IP(该参数可通过激光雷达控制页面获取)。
注:激光雷达组播模式的具体配置方法详见如何配置以太网-组播。
注:若当前电脑使用了以太网口转 USD 接口适配器连接激光雷达,有较小概率会引起 Pandarview2 点云不显示现象,建议更换为可以使用网线直连激光雷达的电脑进行点云实时播放操作。
3.1.2 点云显示不完整
-
检查确认激光雷达光罩是否洁净(如有污渍,可按照产品手册中“仪器维护”章节的操作方法进行清洁);
-
通过网页或 LidarUtilities 软件登录激光雷达控制页面,确认 Azimuth FOV 参数设置是否正确(是否关闭了部分水平 FOV);
-
检查当前激光雷达的转速是否稳定在设置的转速值(可通过 Pandarview2 软件显示的 Motor Speed 数值);需要将激光雷达安装固定后运行,避免运行状态下出现明显振动情况;
-
检查电脑主机操作系统(Windows、Ubuntu)的硬件性能和驱动配置是否满足要求(建议主机处理器内存至少为 16GB,并支持独立显卡且安装了正确版本的显卡驱动);
-
检查电脑主机接收端以太网是否存在过载现象,以及当前网络中是否有其他设备在同时传输数据导致网络过载引起丢包;建议将电脑主机只连接一台激光雷达,不连接其他设备,并将激光雷达重新上电,检查该问题是否消失;
3.2 点云数据文件回放
3.2.1 点云不显示
-
检查当前 Pandarview2 软件是否为官网最新版本;
-
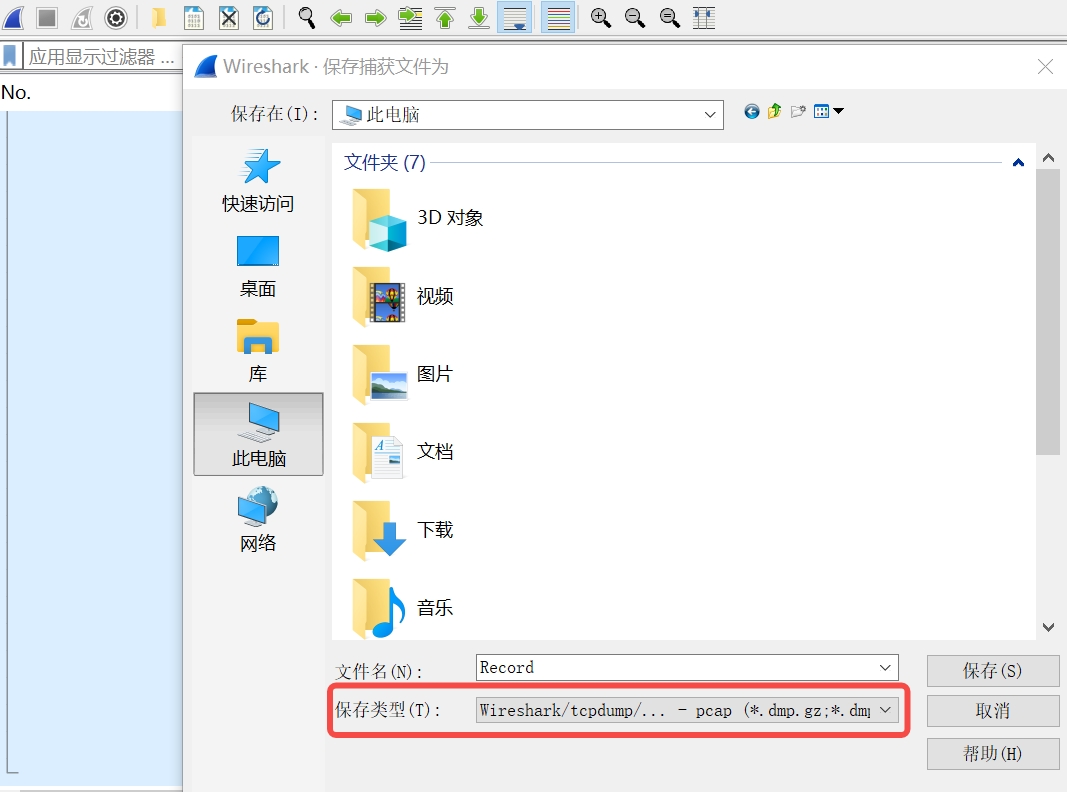
检查回放点云文件是否为.pcap 格式(注:使用 Wireshark 软件录制点云文件时,默认的数据保存格式为.pcapng,需要手动修改为.pcap 格式);
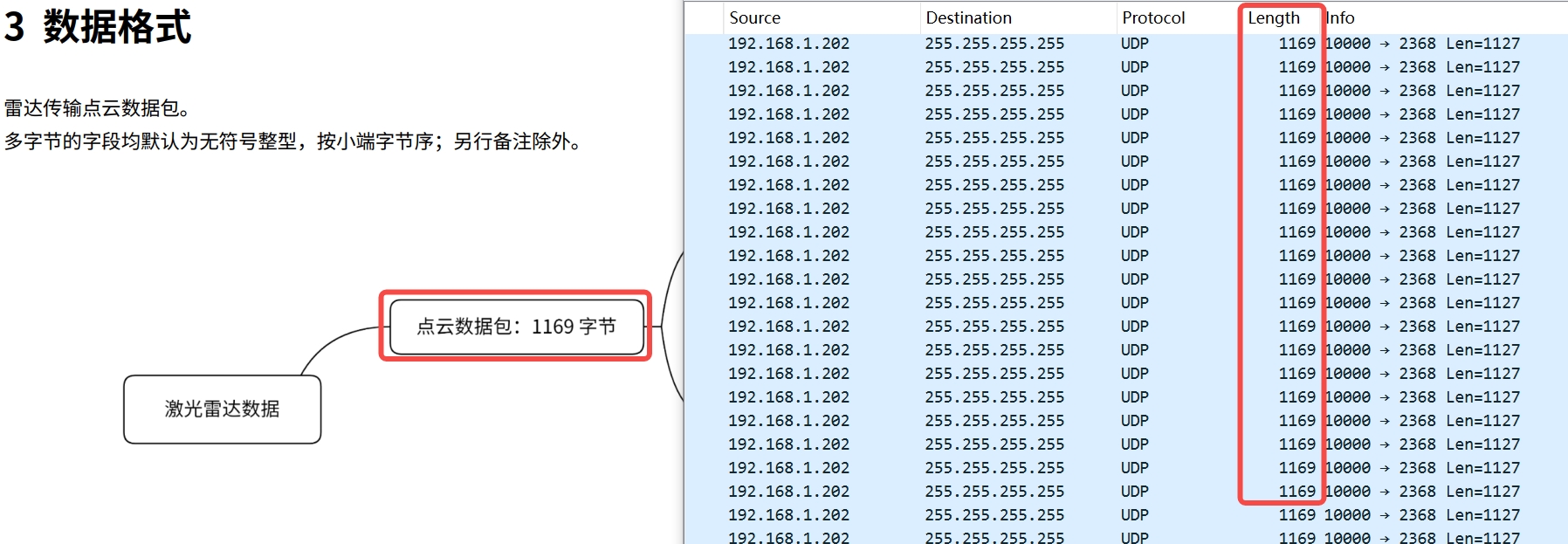
- 检查点云 pcap 文件中的 UDP 报文数据长度和格式是否正确:可在 Wireshark 软件中查看并与该激光雷达手册中定义的点云 UDP 报文长度进行对比确认(如下图所示,以 QT128 为例);
3.2.2 点云显示异常
- 若点云排列明显不规则,需确认当前点云文件对应激光雷达的角度修正文件是否已正常导入(操作方法如下图所示);
- 若点云播放时闪烁,需检查当前点云 pcap 文件是否存在丢包(可通过 Wireshark 查看或联系禾赛技术支持);若未出现丢包,检查电脑主机操作系统的硬件性能和相关驱动配置是否满足要求(参考前述点云实时播放部分排查方法),重启电脑或更换另一台电脑进行测试确认。
若按照上述方法操作后,在使用 Pandarview2 时仍存在其他点云显示相关问题,请联系禾赛技术支持。
此文档对您有帮助吗?