常见问题排查
1 概述
在使用激光雷达的过程中,用户可能会遇到各种问题影响其正常功能运行。本文旨在帮助用户快速排查和解决禾赛激光雷达使用过程中遇到的常见问题。
2 基础使用类问题
2.1 如何检查激光雷达是否正常启动
激光雷达通电前:
- 确认当前环境温度是否满足激光雷达产品的运行温度条件;
- 确认供电端输入的电压和电流是否符合该激光雷达产品的电气要求;
- 确认电源适配器是否可以正常工作,所有线缆(电源线、网线等)是否接触良好并连接正确;
激光雷达通电后:
- 若使用了禾赛标配的接线盒,检查接线盒指示灯:正常状态下接线盒的蓝色 LED 指示灯应为常亮状态(如下图所示);
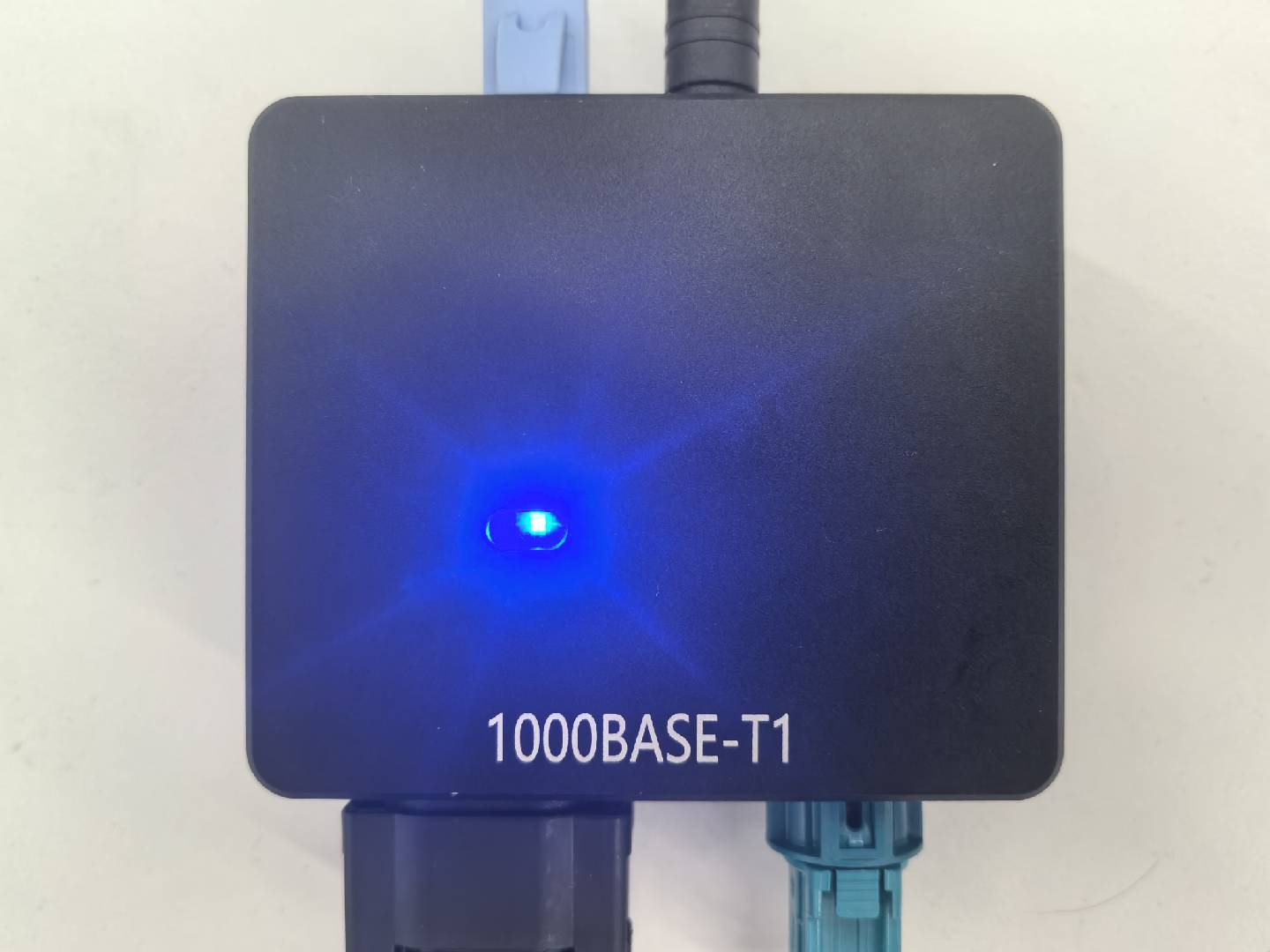
- 若此指示灯不亮,检查供电端状态与硬件连接是否正常(如有条件可使用其他正常接线盒或激光雷达进行交叉实验,确认是否为接线盒自身故障);
- 若此指示灯闪烁,则应为激光雷达与接线盒的以太网配置不一致(如以太网带宽配置不同或主从模式不匹配)导致,可联系禾赛技术支持进一步排查确认;
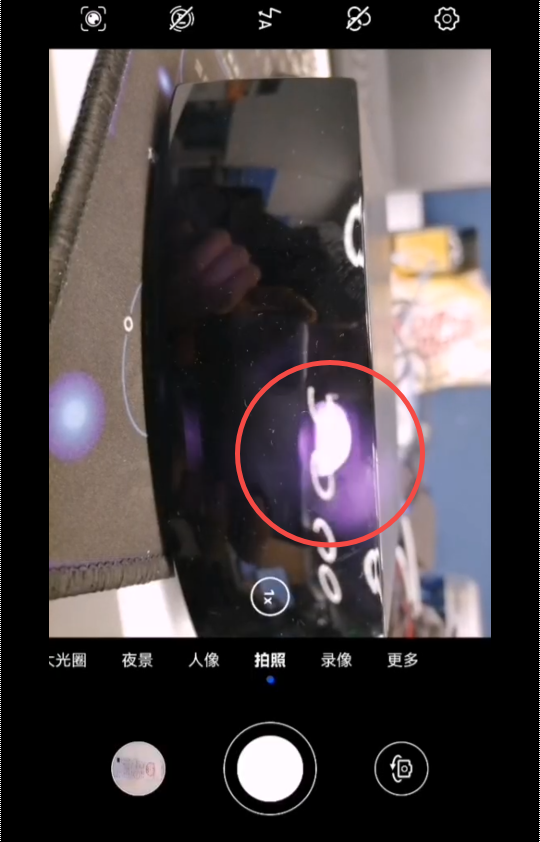
- 确认激光雷达是否正常发光:可使用红外相机,或可看见红外波段的摄像头(推荐 iphone 前置摄像头,或华为手机等),对准雷达光罩表面拍摄,检查是否有紫红色闪烁光斑(类似下图所示);
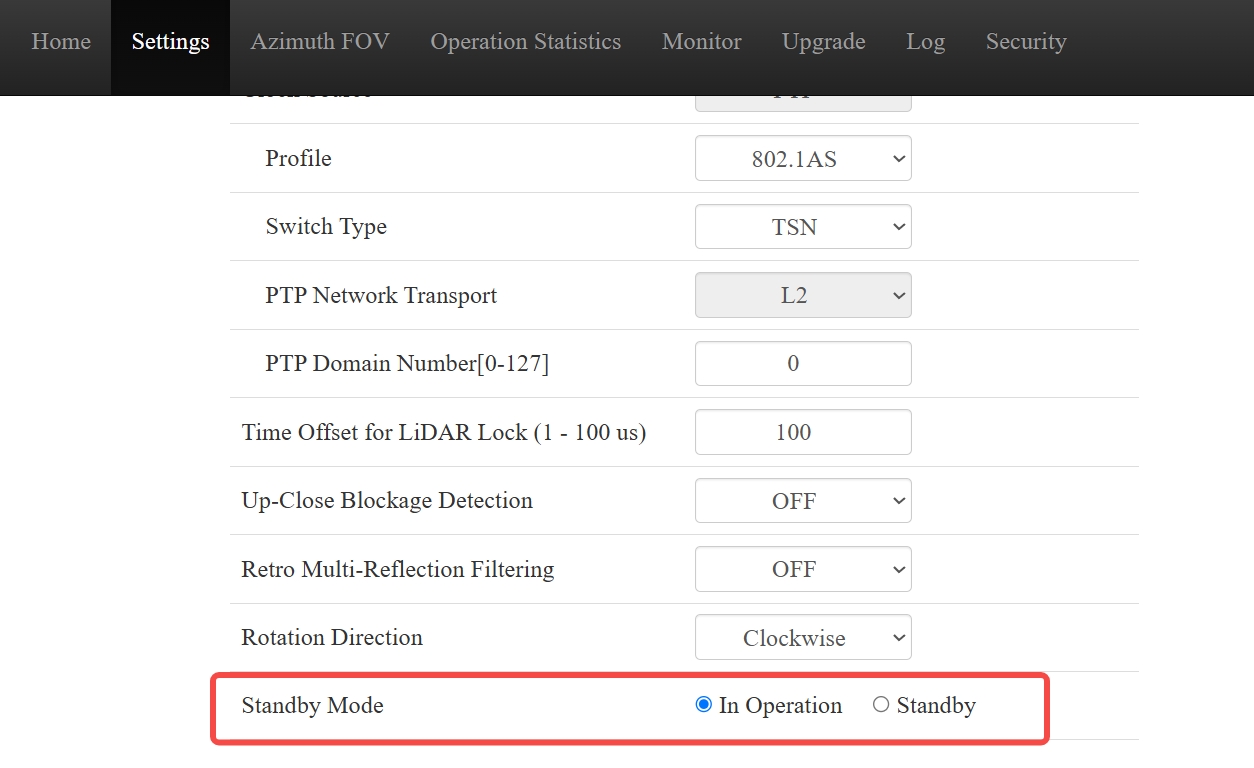
- 若激光雷达连接正常但没有正常发光,确认其是否被设置在 standby 模式(standby 模式下激光雷达处于停转不发光状态),可通过网页或 LidarUtilities 进入激光雷达控制页面查看,如下图所示:
网页控制页面(Pandar 系列/QT 系列/XT 系列等型号)
LidarUtilities 界面(OT128/AT128P 等型号)
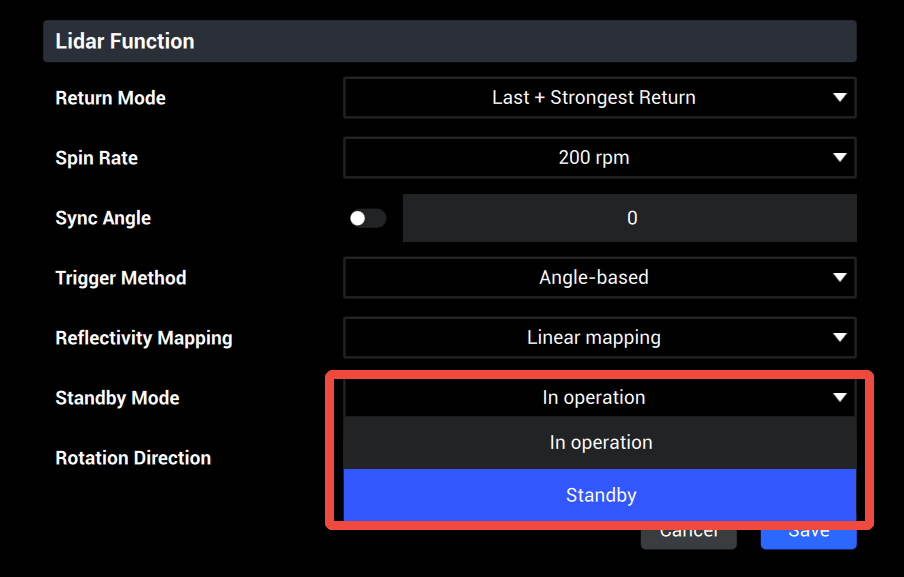
LidarUtilities 软件可通过禾赛官网获取(OT128,AT128P)。
注:若无法通过网页或 LidarUtilities 进入激光雷达控制页面,可参照常见以太网问题排查 内容进行排查。
若按照上述方法操作后,激光雷达仍无法正常启动,请联系禾赛技术支持。
3 网络连接类问题
详见常见以太网问题排查部分内容介绍。
4 点云显示类问题
4.1 PandarView
详见常见 PandarView 问题排查部分内容介绍。
4.2 ROS/RVIZ
详见常见 RVIZ 问题排查部分内容介绍。
5 时间同步类问题
5.1 PTP时间同步
详见常见 PTP 问题排查部分内容介绍。
5.2 GPS时间同步
详见常见 GPS 问题排查部分内容介绍。
此文档对您有帮助吗?