用 GPS 同步时间
1 概述
禾赛激光雷达产品支持使用 GNSS_NMEA 协议(GPRMC 或 GPGGA),通过依靠外部时钟源获取绝对时间,实现激光雷达与系统之间的精确时间同步。
- GPS:即全球定位系统(Global Positioning System),由美国政府开发并运营的卫星导航系统。
- GNSS:即全球导航卫星系统(Global Navigation Satellite System),指所有能够提供全球或区域定位、导航和授时服务的卫星系统,包含了GPS、GLONASS、北斗、GALILEO等,是一个统称。
注:本文中所表述的GPS与GNSS实际含义一致,并不特指美国GPS系统。
2 使用方法
在激光雷达上进行 GPS 时间同步时需要将其连接到第三方 GNSS 模块,并获取 PPS 信号和 NMEA 信息,具体方法与步骤如�下:
注:本文将分别以 Pandar128 和 JT16 为例进行介绍,其中 JT16 仅支持 GPS 同步时间。
2.1 硬件连接
2.1.1 Pandar128
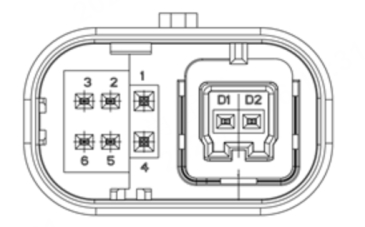
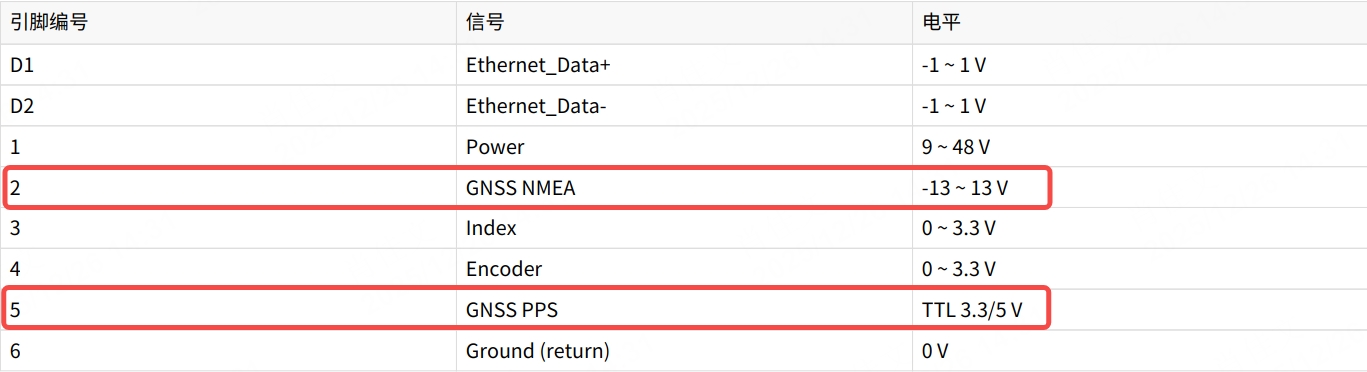
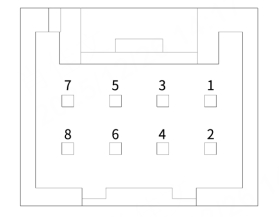
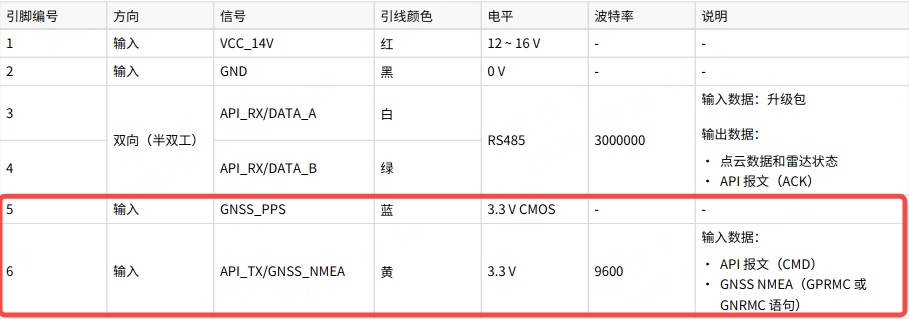
- 激光雷达端引脚定义:
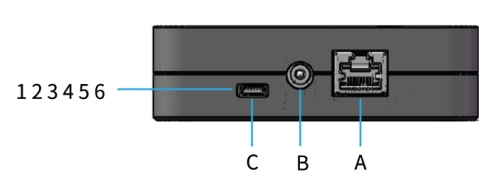
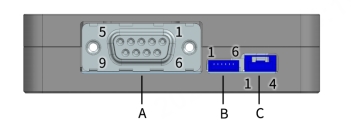
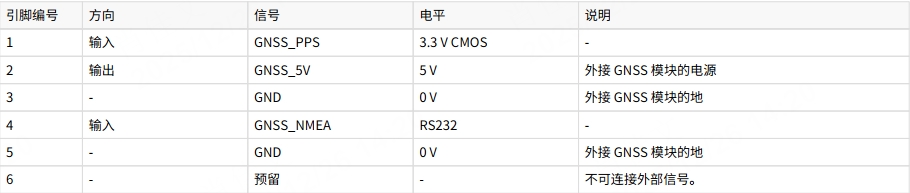
- 接线盒端引脚定义(如使用):


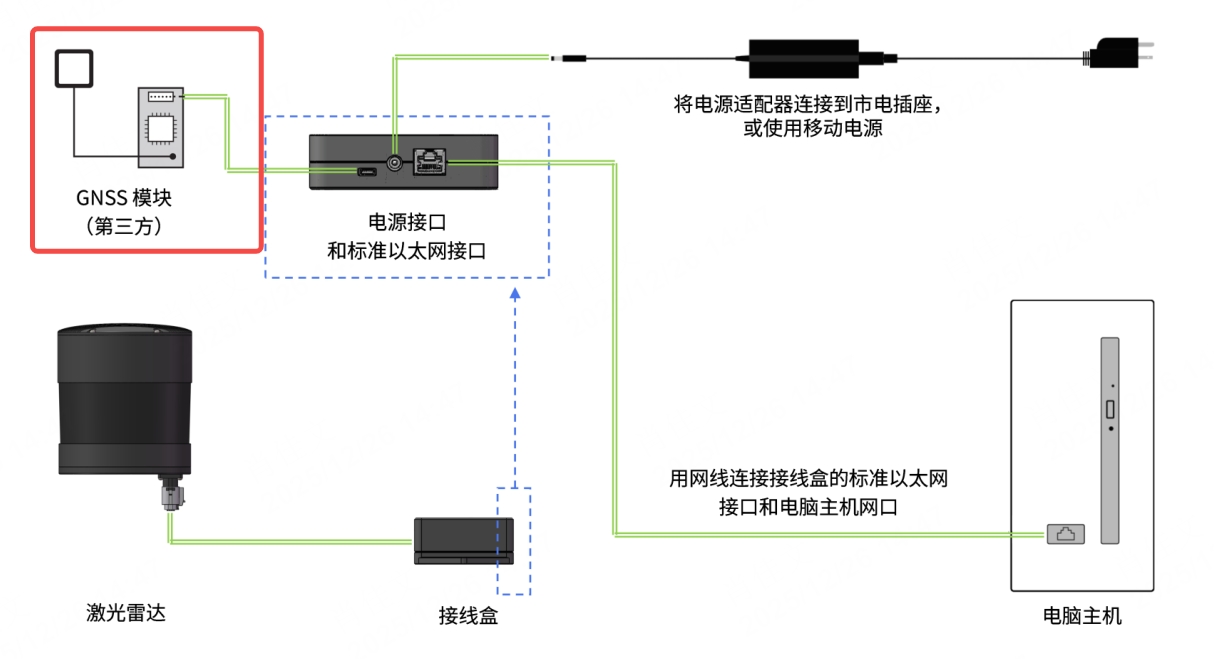
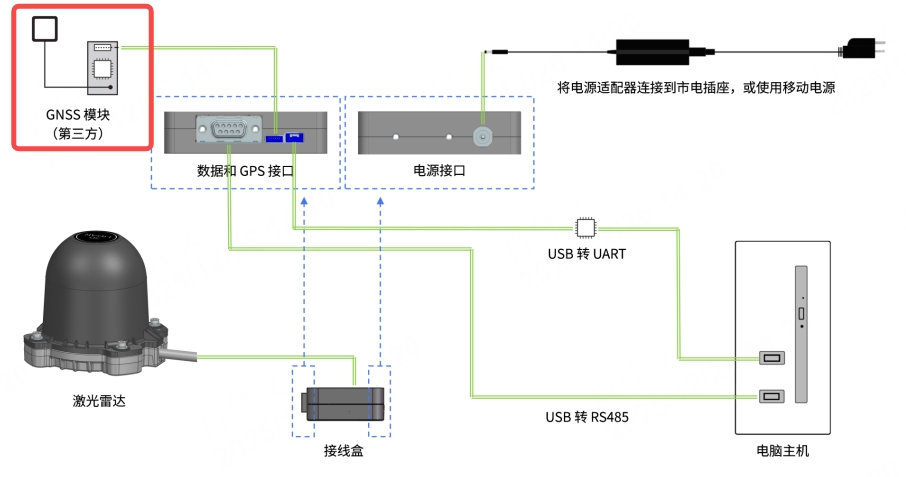
- 若使用接线盒连接到 GNSS 模块时,可参考下图的硬件连接示意:
2.1.2 JT16
- 激光雷达端引脚定义:
- 接线盒端引脚定义(如使用):

- 若使用接线盒连接到 GNSS 模块时,可参考下图的硬件连接示意:
2.2 激光雷达参数配置
2.2.1 Pandar128
-
根据激光雷达 IP 地址,登录网页端界面;
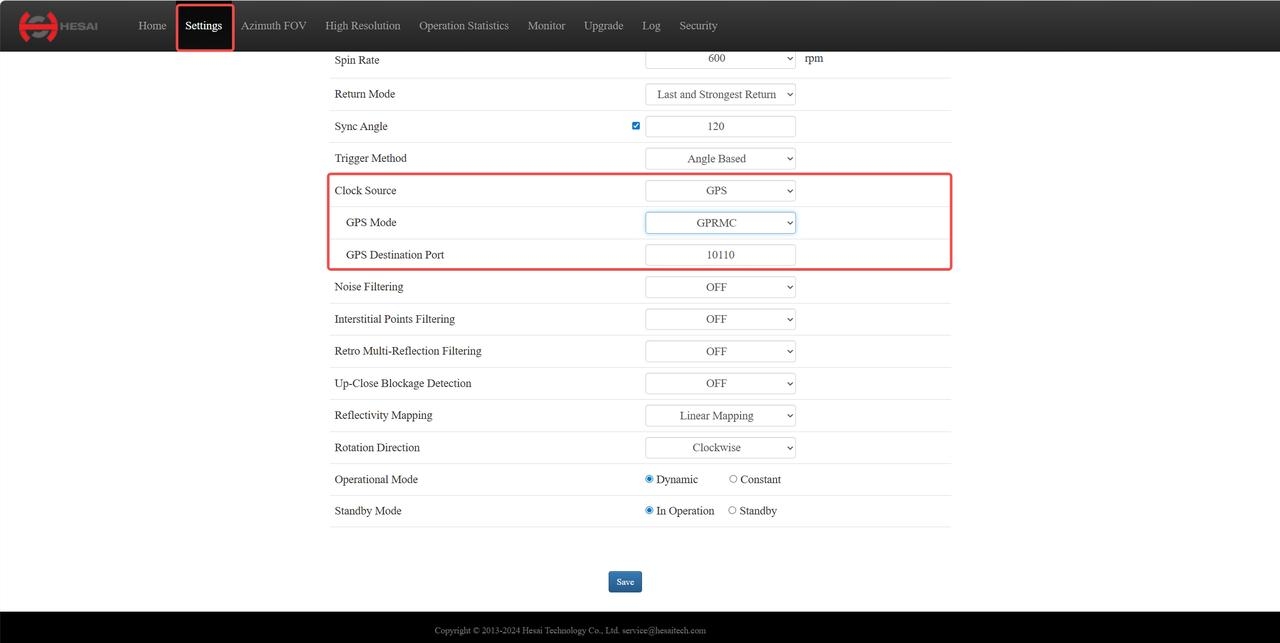
-
进入[Settings]页面,将[Clock Source]配置为
GPS,[GPS Mode]配置为GPRMC或GPGGA,同时设置[GPS Destination Port],即GNSS 数据包的发送端口,默认值为10110;
2.2.2 JT16
JT16 无需设置时间同步参数,默认仅支持 GPS 时间同步模式。
2.3 GNSS 信号电气要求
2.3.1 信号电平要求
| GNSS_PPS | GNSS_NMEA | |
|---|---|---|
| Pandar128 | TTL 3.3V/5V | -13~13V (接线盒端为 RS232 电平) |
| JT16 | CMOS 3.3V | 3.3V (转接盒端为 RS232 电平) |
注:
1. Pandar128 从线缆的 GNSS 引脚接入、断开信号时,或从接线盒的 GNSS 端口插拔 GNSS 模块时,请确保激光雷达处于断电状态。
2. Pandar128 如需在通电状态下操作,请先进行静电释放,且避免用手直接接触 GNSS 端口或引脚。
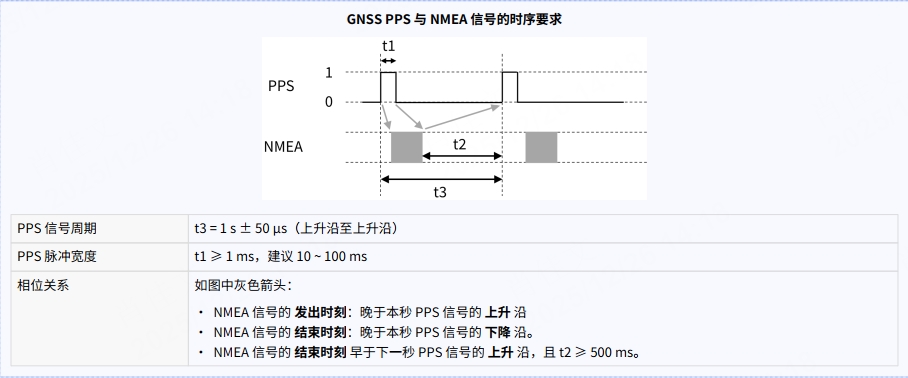
2.3.2 信号时序要求
Pandar128 与 JT16 对于 GNSS 的 PPS 和 NMEA 信号时序要求一致,如下图所述:
2.4 GNSS 信号状态与激光雷达时间更新规则
2.4.1 Pandar128
Pandar128 内部 1Hz PPS 信号的每个上升沿会触发一个 GPS 数据包,其中包含已接收到的 GNSS 信号数据,包括 UTC 时间、定位信号状态等信息。其中 PPS 和 NMEA 信号状态以及相应的激光雷达时间更新规则详见下表中的描述:
| PPS / NMEA 状态 | 日期和时间 | 说明 |
|---|---|---|
| 未锁定(初始) | 虚拟值 | 从一个虚拟的 UTC 时间(例如 2000-01-01 00:00:00)开始,由激光雷达内部 1Hz 信号计数递增,且没有对准整秒时刻。 |
| 锁定 | 同步为真实值 | 激光雷达内部 1Hz 信号的上升沿时,对准PPS脉冲的上升沿,读取上一秒的 NMEA 信息,从中提取日期和时间,自动加 1s,从而得到准确的日期和时间。 |
| 未锁定(失锁) | 内部计时 | 从失锁前的同步时刻开始,由激光雷达内部 1Hz 信号计数递增,相比真实的 GNSS 时间将产生漂移。 |
2.4.2 JT16
JT16 无 GPS 数据包,当输出点云的时间信息与系统时间一致时,即表示 GPS 时间同步成功,否则从一个虚拟的UTC时间开始,由激光雷达内部1Hz信号计数递增。
3 GPS 时间同步结果
3.1 Pandar128
点云 UDP 数据中时间信息在数据尾中,占 10 个字节,包括日期、时间(UTC 时间的整秒部分)及 UTC 时间的微秒部分。
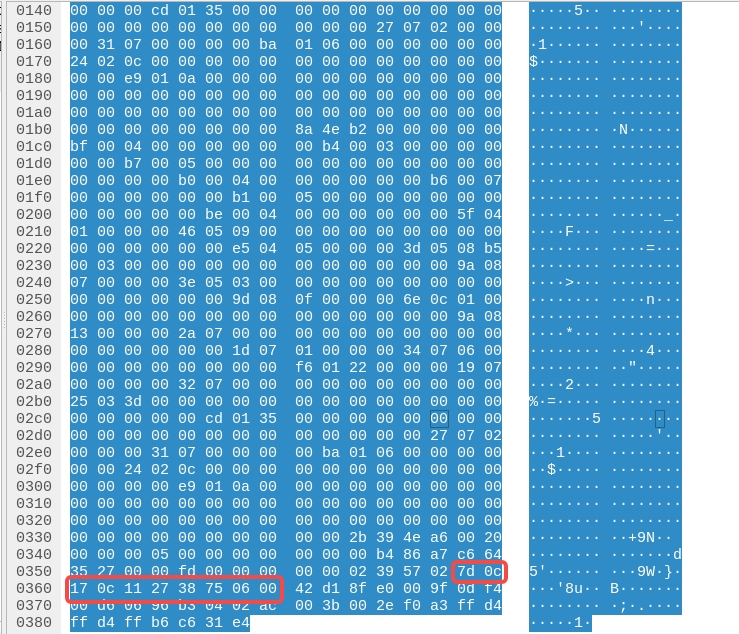
经解析后的UTC时间结果为:2025-12-23 20:17:39.423224。
3.2 JT16
使用禾赛官方 ROS 驱动解析点云数据包,将点云时间戳直接打印在终端,GPS 同步状态下应与系统时间一致。
点云数据中时间信息在数据头中,占 10 个字节,包括日期、时间(UTC 时间的整秒部分)及 UTC 时间的微秒部分。
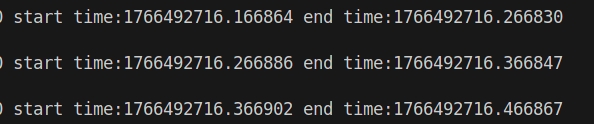
�经解析后的UTC时间结果为:2025-12-23 20:25:16.166864。
注:图中时间戳数据的整数部分(1766492716)为UTC时间整秒部分对应的Unix格式时间,即从UTC时间(协调世界时)1970年1月1日0时0分0秒起累计的总秒数。
4 常见 GPS 时间同步问题排查
4.1 激光雷达 GNSS 信号无法锁定
- 确认 GNSS 设备连接正常(参考硬件连接 部分说明);
- 确认 PPS 信号已输入激光雷达;
- 若为 Pandar128,通过网页或使用 TCP 指令确认[GPS Destination Port]配置是否正确;
- 确认输入的 GNSS 信号激光雷达电气接口和接线盒端口的电气要求;
- 重新上电,查看故障是否消失。
参照上述方法操作后,若激光雷达仍无法实现 GPS 时间同步,请联系禾赛技术支持。
此文档对您有帮助吗?