使用 RVIZ 查看点云
1 概述
禾赛科技提供的 HesaiLidar_ROS_2.0 开发套件,为开发者提供了在 Ubuntu 系统环境下,通过 ROS (Robot Operating System) 框架实现激光雷达数据在 RVIZ 可视化工具中应用的完整解决方案。
本文档将系统讲解 RVIZ 工具在 ROS 环境中的搭建流程、点云可视化配置方法及常见问题的解决策略,帮助开发者快速部署基于 ROS 的激光雷达应用系统。
2 使用方法
RVIZ 可视化工具的环境搭建和配置过程具体如下:
2.1 环境准备
1. 准�备一台装载 UBUNTU 系统的 PC,并安装好 ROS 环境
注:ROS 安装方法可参考http://wiki.ros.org。
2. 查看 ROS 版本:
- ROS1
可通过终端输入roscore查看当前 ROS1 版本,参考下图:
- ROS2
可通过终端输入printenv ROS_DISTRO查看当前 ROS2 版本,参考下图:
3. 连接激光雷达:PC 端连接相关配置方法可参考配置以太网 或配置串口连接。
2.2 搭建 ROS 项目
1. Install Boost
可依次运行以下指令进行 Boost 安装:
sudo apt-get update
sudo apt-get install libboost-all-dev
2. Install Yaml
可依次运行以下指令进行 Yaml 安装:
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
3. CLONE HesaiLidar_ROS_2.0
创建新文件夹以及 src 子文件夹。
进入到 src 目录下运行终端,并执行下方代码完成HesaiLidar_ROS_2.0 下载;
git clone --recurse-submodules https://github.com/HesaiTechnology/HesaiLidar_ROS_2.0.git
2.3 修改配置文件 config.yaml
进入已下载的 HesaiLidar_ROS_2.0 项目文件夹,打开 config.yaml 文件并按照以下注释说明配置相关参数:
lidar:
- driver:
use_gpu: false
source_type: 1 # 1:实时连接激光雷达
# 2: 使用 pcap 文件回放
# 3: 使用 ROS bag 包含的点云包
# 4: 串口通信方式获取点云数据
lidar_udp_type: # 配置 LiDAR 的 UDP 类型
device_ip_address: 192.168.1.201 # 激光雷达的 IP 地址信
udp_port: 2368 # UDP 通信端口
ptc_port: 9347 # PTC 协议端口
multicast_ip_address: 255.255.255.255 # 多播 IP 地址
use_ptc_connected: true # 配置是否使用 PTC 连接
··· ···
# 2. 串口通信方式配置,修改为串口名称
serial_type:
rs485_com: "Your serial port name for receiving point cloud" # rs485 串口名称
rs232_com: "Your serial port name for sending cmd" # rs232 串口名称
point_cloud_baudrate: 3000000/3125000 # 串口波特率
··· ···
2.4 编译并运行 RVIZ
返回文件夹根目录,依次运行下列指令:
1. ROS1
catkin_make
source devel/setup.bash
roslaunch hesai_ros_driver start.launch
2. ROS2
colcon build --symlink-install
. install/local_setup.bash
注:. install/local_setup.bash 这行,‘.’与 install 之间存在一个空格,需要注意。
- For ROS2-Dashing
ros2 launch hesai_ros_driver dashing_start.py
- For Other ROS2 version
ros2 launch hesai_ros_driver start.py
2.5 查看点云效果
完成以上操作后,可通过运行 RVIZ 实时查看激光雷达的点云图像。
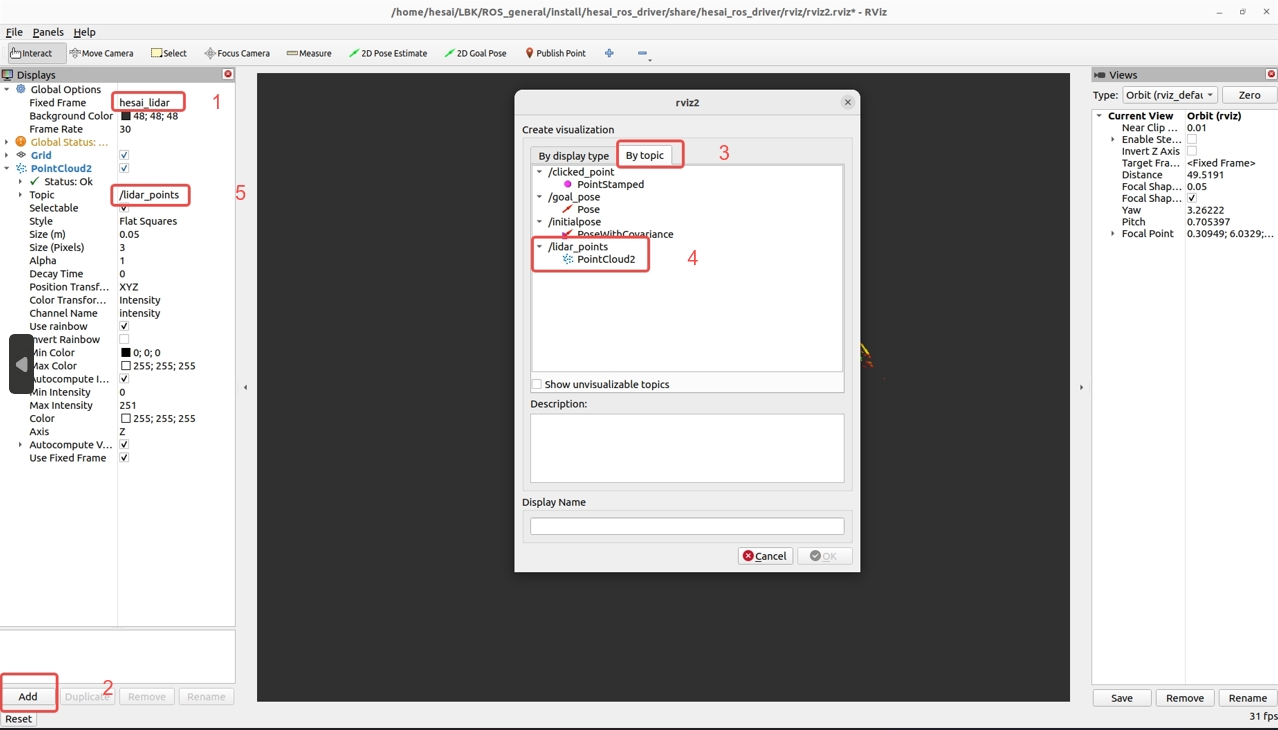
打开 RVIZ 界面后需要先进行 'Frame' 与 'Topic' 相关的参数配置,具体操作步骤详见下图中所标注的序号:
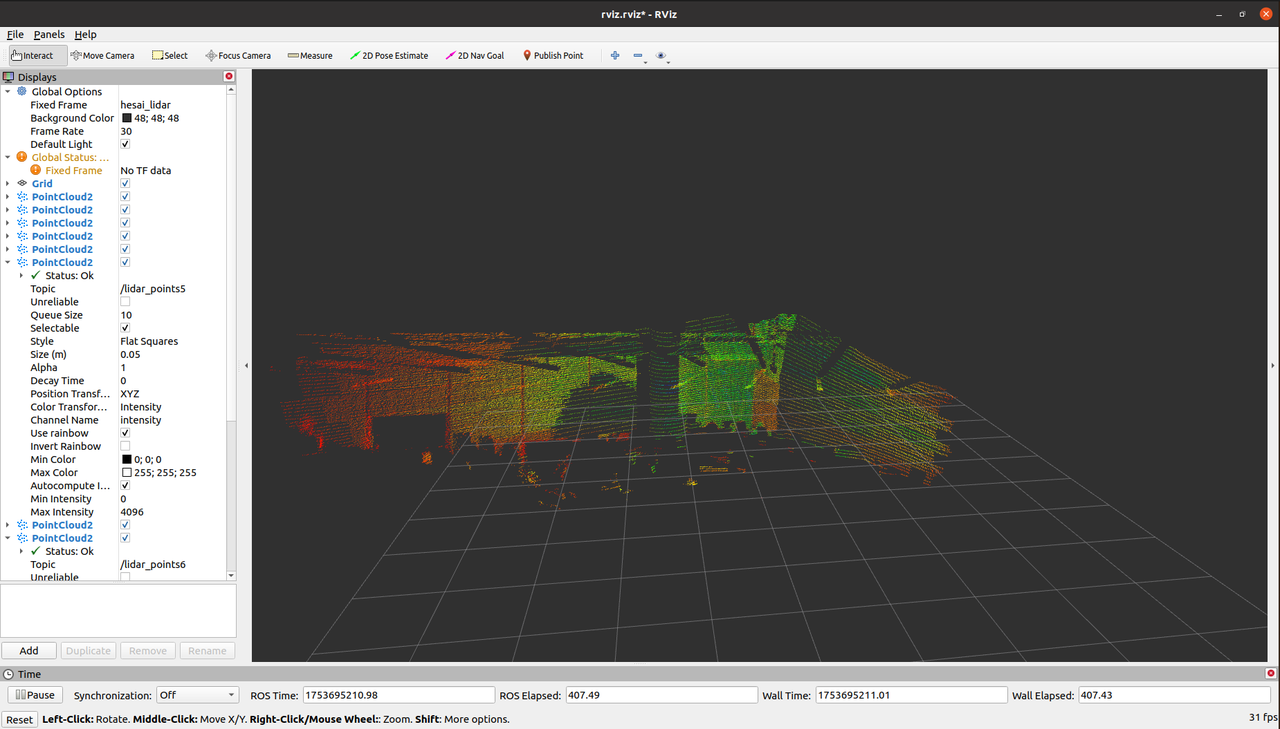
上述配置完成后即可在 RVIZ 主界面中查看对应的点云效果,如下图所示:
3 常见 RVIZ 使用问题排查
3.1 无法执行 catkin_make
系统报错信息如下:
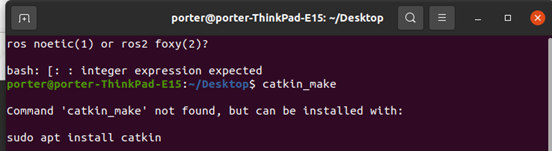
解决方案:
- 查看当前环境下是否存在 ROS 环境,参考ROS 环境准备。
3.2 无法执行 source devel/setup.bash
系统报错信息如下:

问题原因:由于文件夹权限问题所导致。
解决方案:
- 运行‘cd devel’进入文件夹中
- 执行以下命令添加文件执行权限,随后执行‘source ./setup.bash’即可解决。
chmod +x setup.bash
3.3 RVIZ 窗口打开后点云无法显示
解决方案:
- 首先查看激光雷达是否正确连接,可通过 Wireshark、PandarView 等工具分别查看当前雷达是否有数据传输以及点云数据显示;
- 查看 config.yaml 文件中的 IP 地址以及 UDP port 是否与 Wireshark 中获取到的一致,参考修改 config.yaml。
此文档对您有帮助吗?