测距能力
1 概述
作为一种能够在三维环境中准确感知目标物位置的传感器,激光雷达的测距能力是衡量其探测性能的核心指标。此性能不仅受激光雷达本身的硬件架构(如激光发射功率、接收灵敏度等)影响,也同时受到实际环境因素(如使用环境、目标反射率等)的制约。
2 定义
激光雷达的测距能力(Range Capability)指在一定条件下激光雷达能够探测到目标物体并形成有效点云信息的极限距离。测距能力可细分为测距量程、测远性能和测近性能这几个不同指标。
2.1 测距量程(Instrumented Range)
测距量程指激光雷达在物理上能够探测到目标物体并形成点云的最大距离范围。对于测量原理为TOF (Time-of-Flight,即飞行时间测量法) 的激光雷达,其最大测距量程基本由TOF上限,即激光的最大飞行时间所决定,参考以下的计算公式:
D=c*T/2
其中,
- D - 距离
- c - 光速
- T - 激光飞行时间
2.2 测远性能(Maximum Ranging Capability)
测远性能指激光雷达在一定条件下能够探测到目标物体并输出有效点云的最大距离。测远性能通常是激光雷达用户最为关注的测距能力指标。 在实际的使用场景下,激光雷达的测远性能主要取决于以下几点因素:
- 激光器的发光功率、探测器接收灵敏度、光学效率等激光雷达系统设计的影响;
- 目标物的反射率,以及光路中可能存在的折射、散射或镜面反射等现象;
- 应用场景的环境,如环境光强和雨、雪、雾等天气状况的影响; 结合激光雷达的探测模型,当场景环境光越强,背景噪声会增加,从而降低激光雷达接收到的有效信号强度;目标物体的反射率越低,距离越远,激光信号在传播过程中的衰减就越大,激光雷达接收的信号能量也越弱,导致相对于接收到噪声强度的比值即信噪比(SNR)降低,进而影响其有效测远能力。
因此,为了更准确地评价激光雷达的真实测远性能,需要引入以下的定义: 在强环境光下(照度值Aklux),对于反射率为x%的物体至少有y%的概率被探测到,且噪点率小于p的最大距离值。 其中,
- 环境光强(Ambient Illumination Intensity)通常选取室外晴天环境下的照度条件,对应的典型值为100klux;
- 噪点率(False Alarm Rate)指在强环境光条件的影响下,激光雷达SNR降低导致单帧点云数据中出现的非真实存在噪点所占比率; 以Pandar128产品为例,其完整的测远性能指标为“100klux环境光强下,能够以不低于70%的概率探测200m外的10%反射率目标物,且噪点率小于10e-5”。
注:禾赛激光雷达产品的测远性能指标中所描述的最大距离值,并不完全等效于该激光雷达在相应场景和条件下所能实际探测到的最远距离,该距离仍然会受到对应测距量程(TOF)指标的限制。 同样以Pandar128为例,其中部分激光通道的测远性能指标满足140m@10% (探测概率>70%),但实际该通道的测距量程上限仅为100m(见下图红框中信息),即针对10%反射率的目标物,这些通道最远也只能探测到100m。

2.3 测近性能(Minimum Ranging Capability)
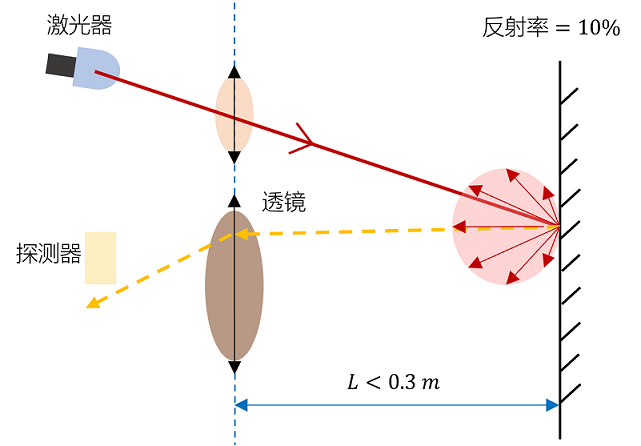
测近性能指激光雷达在一定条件下能够探测到目标物体并输出有效点云的最小距离。相比于测远性能,激光雷达的测近性能主要受其光学系统架构所限制,即当目标距离小于某个特定值时,其返回的激光信号难以被激光雷达探测器有效接收,导致在该距离下信噪比极低,使得目标无法被正常探测到从而形成激光雷达探测盲区(参考如下的示意图)。以Pandar128为例,其最近可以探测到0.3m处的物体,0.3m以内为其探测盲区。
3 探测概率(PoD)
在描述激光雷达测远性能时引入了探测概率(PoD, 即Probability of Detection)的概念,用于表征激光雷达在特定条件下能够成功探测到目标物体的概率。这一指标对于衡量激光雷达在不同距离下的实际探测性能起着至关重要的作用。
对于某一固定位置的目标物体,其探测概率(PoD)可按照以下公式进行计算:
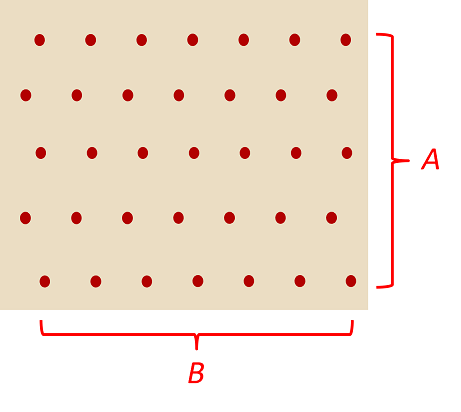
即该目标物体的PoD为该距离下激光雷达有效探测点数量与理论点数量的比值。其中有效探测点数可直接从点云数据中获取,理论点数则可基于目标物尺寸大小、目标距离以及激光雷达的角度分辨率等参数进行仿真计算。如下图所示,当一激光雷达垂直入射一矩形目标板时,通过上述参数分别��计算出该目标板垂直和水平方向上最大可探测到的点数A和B,则激光雷达探测该目标板的理论点数量即为[A*B]。
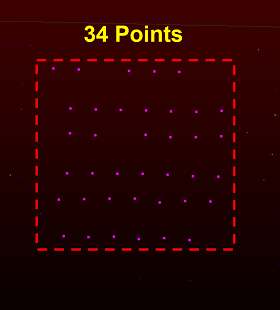
以Pandar128为例,对于一块尺寸为2.4m×2.4m,反射率为10%的标准反射板,按照上述方法计算得到的200m理论点数为42(=7*6),而在该场景下实测得到的反射板有效点数为34(如下图点云所示),由此可得在这一帧下该10%反射率目标板在200m距离下的PoD为34/42=81%,满足Pandar128的PoD>**70%**的参数指标。
在评价某个激光雷达产品的PoD时,通常需要使其对某一目标进行多次测量取多帧点云的平均PoD作为最终结果,因此该参数也在一定程度上体现了激光雷达测远性能的稳定性和持续性。
由于激光雷达PoD会随着目标距离的增加而从100%不断衰减,通常需要在定义激光雷达的最大测远距离同时设置一个较高的探测概率指标(如Pandar128的PoD>70%),以确保在实际应用场景中,激光雷达能够在该距离下持续探测到目标物体并输出覆盖其基本特征的点云数据。
以自动驾驶应用为例,通常车端控制系统要求激光雷达能够探测到200m甚至更远处的10%反射率物体。然而即使车上所使用的激光雷达标称的最大测远距离远超出这个数值(例如达到了400m),然而如果对应的PoD很低(例如小于 30%),那么这一测远性能指标也不具备任何的实用价值,因为该距离下激光雷达无法稳定输出足够数量的目标物体点云信息提供给后端系统的感知算法进行有效识别;只有当目标距离降低,PoD提高到一个较高水平时,后端感知系统才有可能基于激光雷达的点云信息输出准确的识别结果。
此文档对您有帮助吗?