测距精准度
1 概述
激光雷达通过主动发射激光束并测量反射光的飞行时间(Time-of-Flight)来确定目标物体的距离。在实际应用中,我们不仅需要知道测量结果与真实距离的接近程度,还需要了解测量结果的稳定性和一致性。准度和精度正是用于描述这两个方面的重要参数。
2 定义
2.1 准度(Accuracy)
准度,也称为准确度,是指测量结果与真实值之间的偏离程度。在激光雷达测距中,准度反映了在一定测量条件下,对某一目标多次测量得到的距离值与目标距离真值之间的偏差。
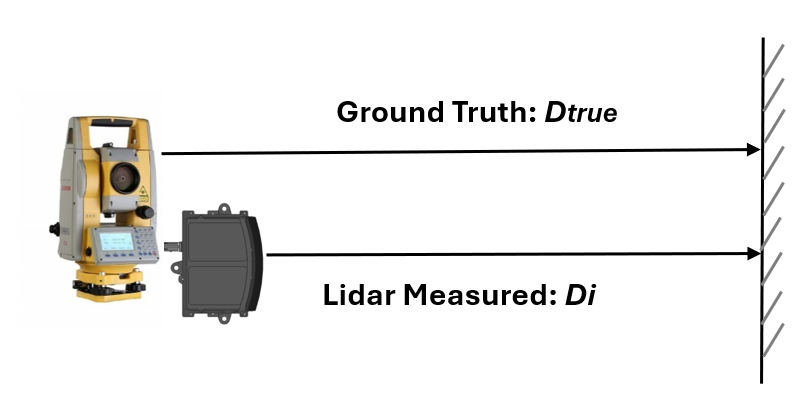
参考上图,激光雷达的测距准度可通过多次测距结果的平均值与目标距离真实值(此真值通常可使用测距精准度非常高的设备作为基准进行标定获取,如全站仪)之间的偏差𝜇来评估,具体公式如下:
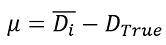
(式中,�𝐷𝑖为单次测距结果,𝐷𝑇𝑟𝑢𝑒为目标距离真值)
𝜇越小,说明激光雷达的测距准度越高。影响激光雷达测距准度的主要因素包括:
- 系统误差:激光雷达的校准、环境因素(如温度、气压)的影响等。
- 激光雷达测量原理本身可能引入的一定误差;
2.2 精度(Precision)
精度,也称为精密度,是指测量结果的重复性或一致性,即多次测量同一目标物体时,测量结果之间的离散程度。在激光雷达测距中,精度反映了激光雷达在相同条件下对同一目标物体进行多次测量时,测量结果的稳定性。
同样参考上图中的示意图,激光雷达的测距精度可通过计算多次测距结果的标准差𝜎来评估,具体公式如下:
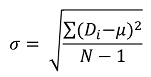
(式中,𝜇为前面计算得到的测距平均值与距离真值偏差,𝑁为测量次数)
𝜎越小,说明激光雷达的测距精度越高。影响激光雷达测距精度的主要因素包括:
- 测量噪声:激光雷达内部器件与电路产生的光电噪声会影响测量结果的稳定性。
- 信号抖动:由于激光脉冲的发射和接收过程中的不稳定性,导致测量信号出现抖动。
- 目标物体表面特性:目标物体的反射率、表面粗糙度等特性会影响反射信号的强度和稳定性,从而影响测量精度。
3 准度与精度的关联
准度和精度是两个不同的概念。准度关注的是测量结果与真实值之间的偏差,而精度关注的是测量结果的重复性或一致性。
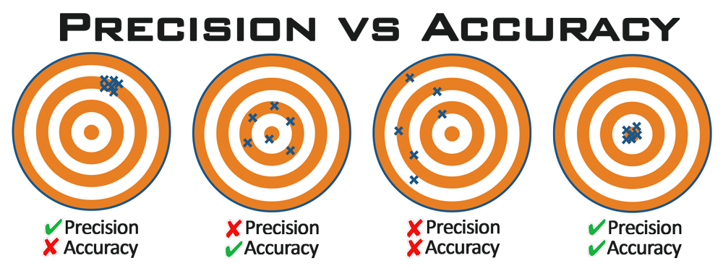
为了更直观地理解两者的区别,我们可以参考如下图所示的打靶案例进行说明。假设一个射手进行打靶训练,靶心代表目标物体的真实位置(距离真值)。当射手多次射击后:
- 子弹击中靶子的位置都集中在靶子的某个区域,但这个区域整体偏离了靶心:类似激光雷达测量精度高但准度低的情况,即测量结果非常一致,但都与真实值有较大偏差;
- 子弹击中靶子的位置比较分散,但都围绕在靶心附近:类似激光雷达测量精度低但准度高的情况,即测量结果不一致,但整体接近真实值;
- 子弹击中靶子的位置分散在靶子的各个地方,且没有一个集中的区域:类似于激光雷达测量精度低准度也低的情况,即测量结果与真实值偏差大,且相互之间的一致性也较差;
- 子弹击中靶子的位置既集中又非常接近靶心:类似于激光雷达测量既精度高又准度高的情况。
在实际应用中,测距准度和精度都是评估激光雷达性能的重要指标。一个优秀的激光雷达产品应该同时具备高测距准度和高测距精度,即测量结果既接近真实值又非常稳定。例如,在自动驾驶应用中,激光雷达需要准确地感知周围环境中物体的距离,并且每次测量的结果都要保持一致,这样才能确保自动驾驶车辆的��安全行驶。
此文档对您有帮助吗?