Ranging Capability
1 Overview
As a sensor which can accurately detect the position of target objects in a three-dimensional environment, lidar's ranging capability is a key indicator for measuring its detection performance. This performance is not only influenced by the hardware architecture of the lidar itself (e.g. laser emission power, receiver sensitivity) but is also constrained by actual environmental factors (e.g. various environment conditions, target reflectivity).
2 Definitions
The ranging capability of lidar refers to the extreme distance under certain conditions at which the lidar can detect a target object and generate valid point cloud. Ranging capability can be subdivided into different metrics: instrumented range, maximum range detection, and minimum range detection.
2.1 Instrumented Range
Instrumented range refers to the maximum physical distance at which the lidar can detect a target object and generate point clouds. For lidar using the TOF (Time-of-Flight) measurement principle, the maximum instrumented range is primarily determined by the TOF limit, i.e., the maximum flight time of the laser, as calculated by the following formula:
D = c * T / 2
- D - Distance
- c - Speed of light
- T - Laser flight time
2.2 Maximum Ranging Capability
Maximum ranging capability refers to the maximum distance under certain conditions at which the lidar can detect a target object and output valid point clouds. Maximum ranging capability is usually the most concerned ranging capability metric for lidar users.
In practical scenarios, the maximum ranging capability of lidar mainly depends on the following factors:
- The design of the lidar system, including laser emission power, detector sensitivity, and optical efficiency;
- The reflectivity of the target object, as well as phenomena such as refraction, scattering, or specular reflection in the optical path;
- Environmental factors in the application scenario, such as ambient light intensity and weather conditions like rain, snow or fog.
According to the lidar detection model, stronger ambient light increases background noise, reducing the effective signal strength received by the lidar. Lower target reflectivity and greater distances cause more attenuation of the laser signal during propagation, weakening the signal energy received by the lidar. This reduces the signal-to-noise ratio (SNR), thereby affecting the effective maximum ranging capability.
To more accurately evaluate the actual maximum ranging capability of lidar, the following definition is introduced:
Under strong ambient light (illuminance value A klux), the maximum distance at which a target object with x% reflectivity can be detected with at least y% probability and a false alarm rate below p.
Where:
- Ambient illumination intensity is typically selected under outdoor sunny conditions, with a typical value of 100 klux;
- False alarm rate refers to the proportion of non-existent noise points in single-frame point cloud data caused by reduced SNR under strong ambient light conditions.
For example, the complete maximum ranging capability specification of Pandar128 is "Under 100 klux ambient light, it can detect a 10% reflectivity target object at 200m with a probability of no less than 70% and a false alarm rate below 10e-5."
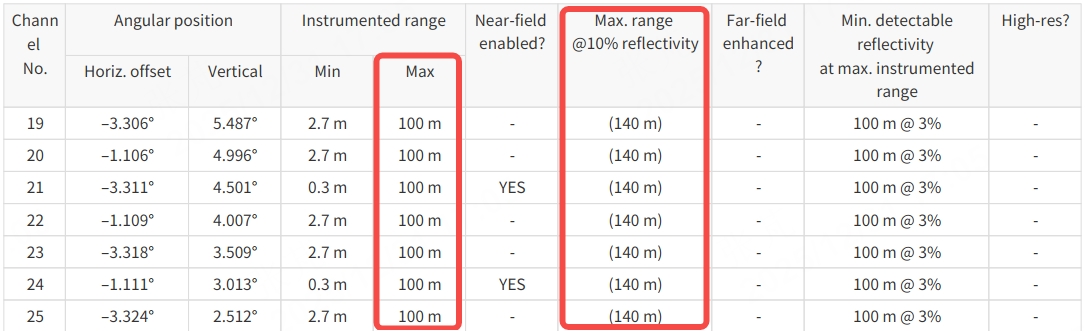
Note: The maximum ranging capability described in the specifications of Hesai lidar products does not fully equate to the actual maximum distance that the lidar can detect under corresponding scenarios and conditions. This distance is still limited by the instrumented range (TOF) metric.
For example, in Pandar128, some laser channels meet the maximum ranging capability specification of 140m@10% (detection probability >70%), but the actual instrumented range limit of these channels is only 100m (see the red box in the figure below). This means that for a 10% reflectivity target object, these channels can only detect up to 100m.
2.3 Minimum Ranging Capability
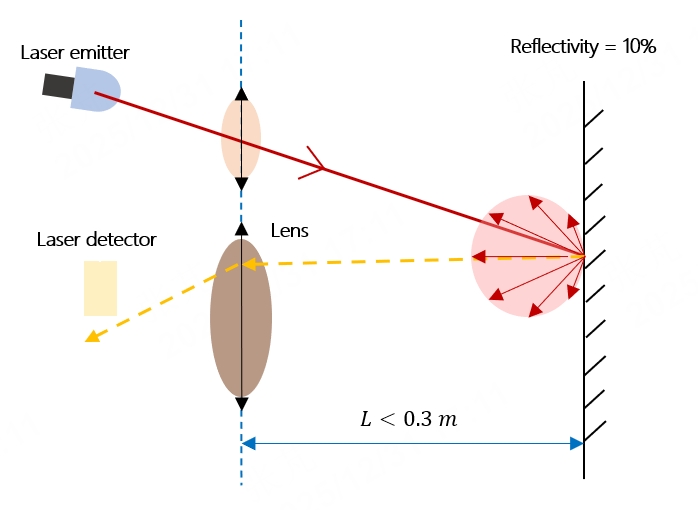
Minimum ranging capability refers to the minimum distance under certain conditions at which the lidar can detect a target object and output valid point clouds. Compared to maximum ranging capability, the minimum ranging capability of lidar is mainly limited by its optical system architecture. When the target distance is less than a specific value, the returned laser signal is difficult for the lidar detector to effectively receive, resulting in an extremely low SNR (Signal-to-Noise Ratio) at that distance. This creates a detection blind zone for the lidar (see the schematic diagram below). For example, Pandar128 can detect objects as close as 0.3m, with a detection blind zone within 0.3m.
3 Probability of Detection (PoD)
The concept of Probability of Detection (PoD) is introduced when describing the maximum ranging capability of lidar. It characterizes the probability that the lidar can successfully detect a target object under specific conditions. This metric plays a crucial role in evaluating the actual detection performance of lidar at different distances.
For a target object at a fixed position, the PoD can be calculated using the following formula:
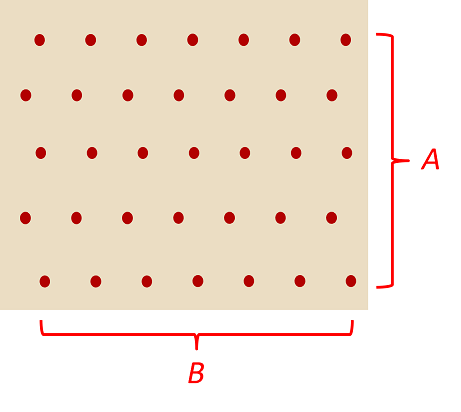
The PoD of the target object is the ratio of the number of valid detected points to the theoretical number of points at that distance. The number of valid detected points can be directly obtained from the point cloud data, while the theoretical number of points can be simulated based on parameters such as the target object size, target distance, and lidar angular resolution. As shown in the figure below, when a lidar fires lasers vertically towards a rectangular target board, the maximum detectable points in the vertical and horizontal directions of the target board are calculated as A and B, respectively, based on the above parameters. The theoretical number of points detected by the lidar on the target board is [A*B].
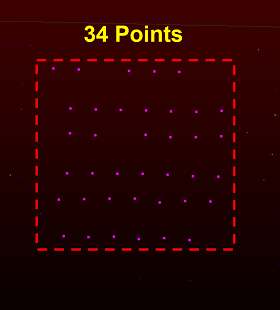
For example, in Pandar128, a standard reflective board with dimensions of 2.4m×2.4m and a reflectivity of 10% is used. The theoretical number of points at 200m is calculated as 42 (=7*6), while the actual number of valid points detected in this scenario is 34 (as shown in the point cloud below). Thus, the PoD of the 10% reflectivity target board at 200m in this frame is 34/42=81%, meeting the specification of PoD>70% in Pandar128.
When evaluating the PoD of a lidar product, it is usually necessary to measure the target multiple times and take the average PoD of multiple frames of point cloud data as the final result. Therefore, this parameter also reflects the stability and continuity of the lidar's maximum ranging capability performance to some extent.
Since the PoD of lidar decreases from 100% as the target distance increases, it is usually necessary to set a high detection probability metric (e.g., PoD>70% for Pandar128) when defining the maximum ranging capability of lidar. This ensures that in practical application scenarios, the lidar can continuously detect the target object at that distance and output point cloud data that covers its basic features.
For example, in autonomous driving applications, the vehicle control system typically requires the lidar to detect 10% reflectivity objects at 200m or even farther. However, even if the lidar used on the vehicle has a nominal maximum ranging capability far exceeding this value (e.g., reaching 400m), if the corresponding PoD is very low (e.g., less than 30%), then this maximum ranging capability metric has no practical value. This is because the lidar cannot stably output enough point cloud data of the target object at that distance for the perception algorithm of the backend system to effectively identify. Only when the target distance decreases and the PoD increases to a high level, the backend processing system can output accurate perception results based on the lidar's point cloud data.
Find it useful?