Troubleshooting
1 Overview
During the application of lidar, users may encounter various issues affecting its normal operation. This document aims to help users quickly troubleshoot and resolve the common issues encountered when using Hesai lidar products.
2 Basic Operation Issues
2.1 How to Check Whether the Lidar is Starting Properly
Before powering on the lidar:
- Ensure the current ambient temperature meets the operating temperature requirements of the lidar product.
- Ensure the input voltage and current at the power supply end meet the electrical requirements of the lidar product.
- Confirm that the power adapter is functioning properly and all cables (power cables, Ethernet cables, etc.) are securely connected and properly attached.
After powering on the lidar:
- If Hesai standard connection box is used, check the indicator light on the box: Under normal conditions, the blue LED indicator light on the connection box should be always ON (as shown below).
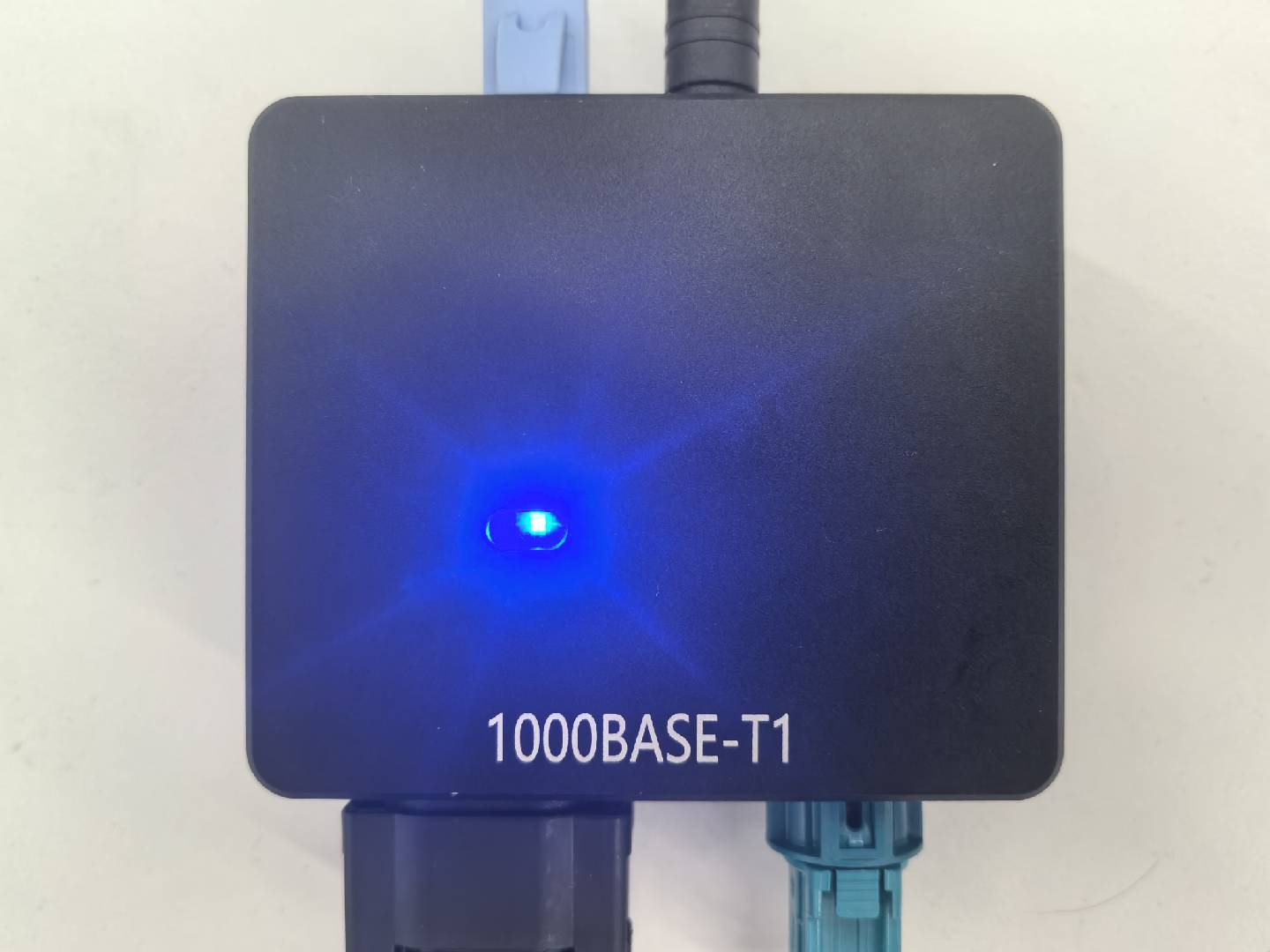
- If the indicator light is off, check the power supply status and hardware connections (if possible, use another working connection box or lidar for cross-testing to confirm if the issue is with the connection box itself).
- If the indicator light is flashing, it may be due to the mismatched Ethernet configurations between the lidar and the connection box (e.g., not the same Ethernet bandwidth settings or mismatched master-slave modes). Please contact Hesai technical support for further troubleshooting.
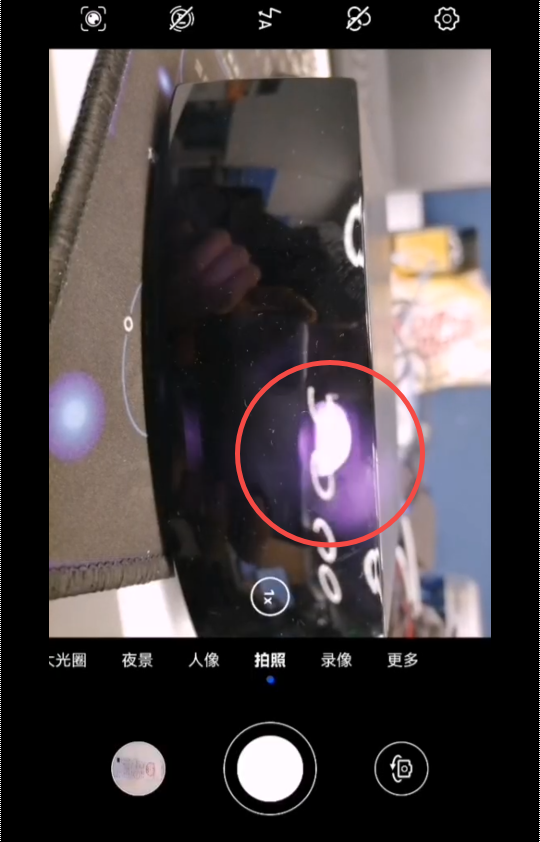
- Check if the lidar is emitting light: Use an infrared camera or a camera capable of detecting infrared wavelengths (recommended: iPhone front camera or Huawei phones) to capture the surface of the lidar's lens and check if there is any visible purple-red flashing spots (similar to the image shown below).
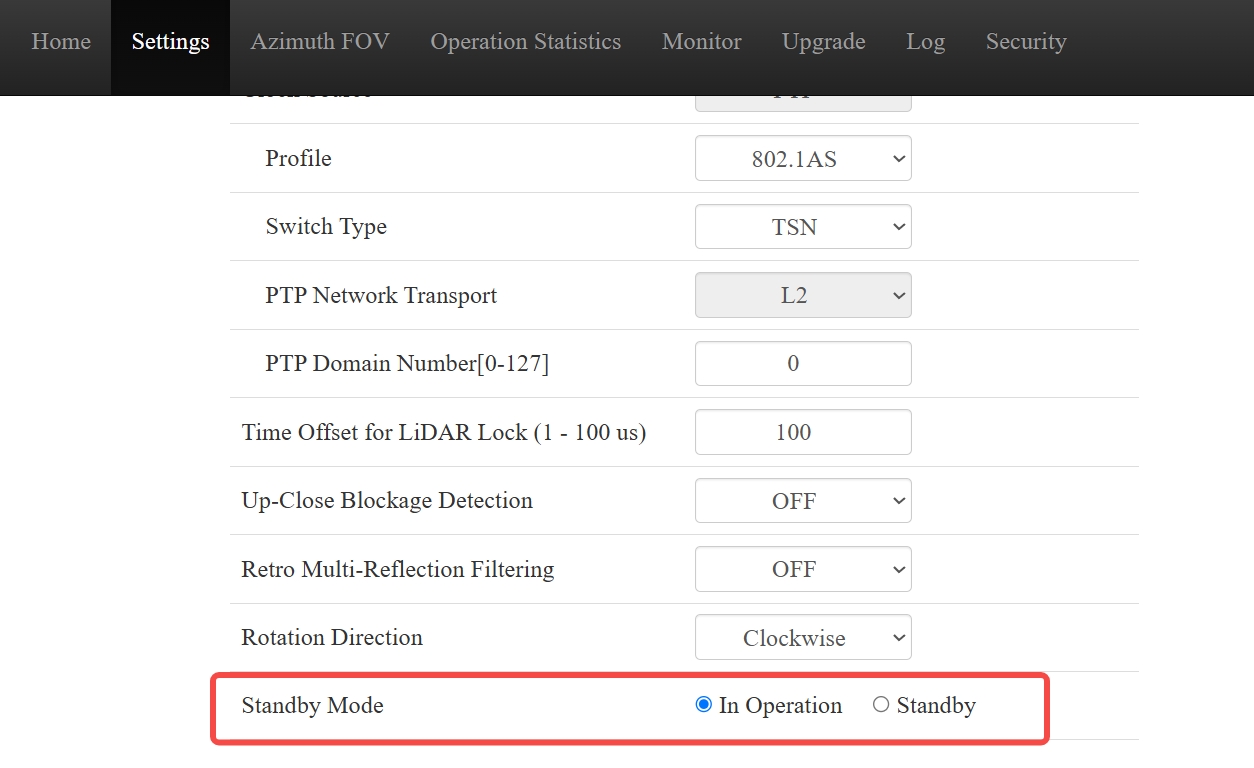
- If the lidar is connected properly but not emitting light, check if it is set to standby mode (in standby mode, the lidar stops rotating and does not emit light). Users can check this via the web interface or LidarUtilities software, as shown below:
Web control page (Pandar series/QT series/XT series)
lidarUtilities interface (OT128 / AT128P)
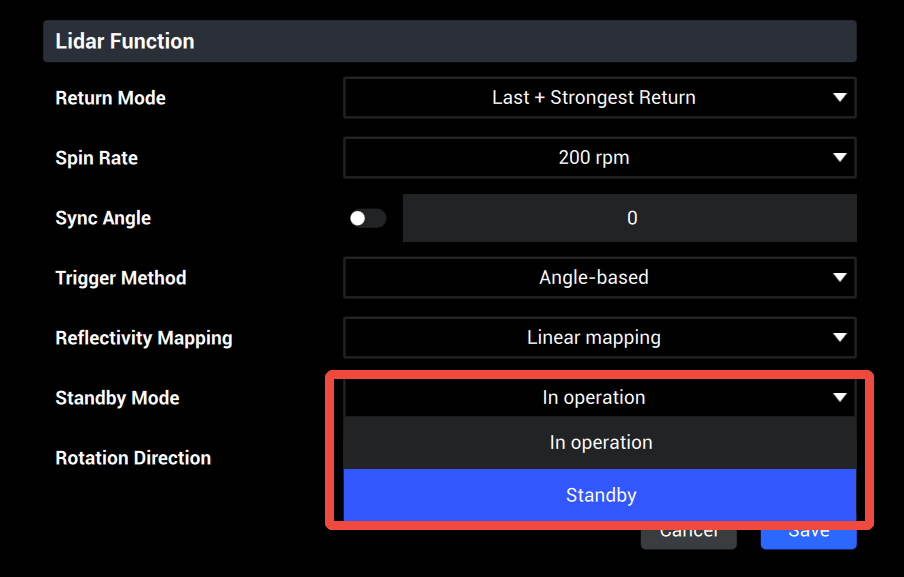
LidarUtilities can be downloaded from Hesai's official website (OT128,AT128P).
Note: If users cannot access the lidar control page via the webpage or LidarUtilities, please refer to Common Ethernet Issues Troubleshooting.
If the lidar still fails to start after following the above steps, please contact Hesai technical support.
3 Network Connection Issues
Refer to Common Ethernet Issues Troubleshooting for more details.
4 Point Cloud Display Issues
4.1 PandarView
Refer to Common PandarView Issues Troubleshooting for more details.
4.2 ROS/RVIZ
Refer to Common RVIZ Issues Troubleshooting for more details.
5 Time Synchronization Issues
5.1 PTP Time Synchronization
Refer to Common PTP Issues Troubleshooting for more details.
5.2 GPS Time Synchronization
Refer to Common GPS Issues Troubleshooting for more details.
Find it useful?